掌握卡尔曼滤波器:基础介绍与应用
本篇文章《SIGGRAPH2001:课程8 - Kalman滤波器入门》由Gary Bishop教授,来自北卡罗来纳大学教堂山分校计算机科学系,探讨了kalman滤波器的基本概念和技术。课程旨在提供对这种关键的信号处理和估计方法的深入理解,适用于电子工程、控制系统、机器人学和人工智能等领域。
1. **课程概述**:
课程从介绍开始,首先定义了课程的目的,即向学生传授kalman滤波器的基础理论,包括其在实际问题中的应用。课程覆盖概率论、随机变量、状态空间模型、估计理论等基础知识,并逐步引导学生理解kalman滤波器的设计与实现。
2. **概率和随机变量**:
课程的核心建立在概率和随机变量的基础之上。学习者将理解概率的概念,包括概率的性质和计算;随机变量的定义,以及它们如何描述系统的不确定性。重点放在均值和方差,这是衡量随机变量行为的关键统计指标。此外,还将介绍正态或高斯分布,这是kalman滤波中最常用的分布假设。
3. **Stochastic Estimation(随机估计)**:
进一步,课程探讨了状态空间模型,这是一种将随机过程建模为系统状态随时间变化的数学框架。在这个部分,学生会学习如何设计观测器,解决如何从测量数据中估计系统状态的问题。
4. **Kalman Filter(卡尔曼滤波器)**:
课程的核心部分是kalman滤波器,分为离散kalman滤波器和扩展kalman滤波器(EKF)。离散版本适用于数字信号处理,而EKF则处理连续系统,通过线性化非线性模型以求解近似解。通过一个估计随机常数的例子,学生可以理解滤波器如何在实践中应用。
5. **其他主题**:
课程并未止步于基本概念,还涵盖了其他相关话题,如参数估计或滤波器的调整,以适应不同场景。多模态(多模型)滤波器用于处理不确定性的多个来源,而混合或多传感器融合则强调了整合多个信息源的重要性,以提高估计精度。
这篇教程不仅介绍了kalman滤波器的基本原理,还展示了其在实际问题中的灵活性和适应性,使读者能够掌握这一关键的工程技术工具,并能在各自的领域中有效应用。
SIGGRAPH 2001, Los Angeles, CA, August 12-17, 2001
12
Bayes’ Rule
In addition, Bayes’ rule follows from (2.3), offering a way to specify the probability
density of the random variable given (in the presence of) random variable . Bayes’
rule is given as
.
Continuous-Discrete
Given a discrete process and a continuous process , the discrete probability mass
function for conditioned on is given by
. (2.16)
Note that this formula provides a discrete probability based on the conditioning density,
without any integration. See (Kelly 1994) p. 546 for further explanation and proofs of the
above.
2.6 Spatial vs. Spectral Signal Characteristics
In the previous sections we looked only at the spatial characteristics of random signals. As
stated earlier, the magnitude of the variance of a signal can give us a sense of how much
jitter or “noise” is in the signal. However a signal’s variance says nothing about the
f
X
x()
σ
x ∞→x ∞–→
m
x
0
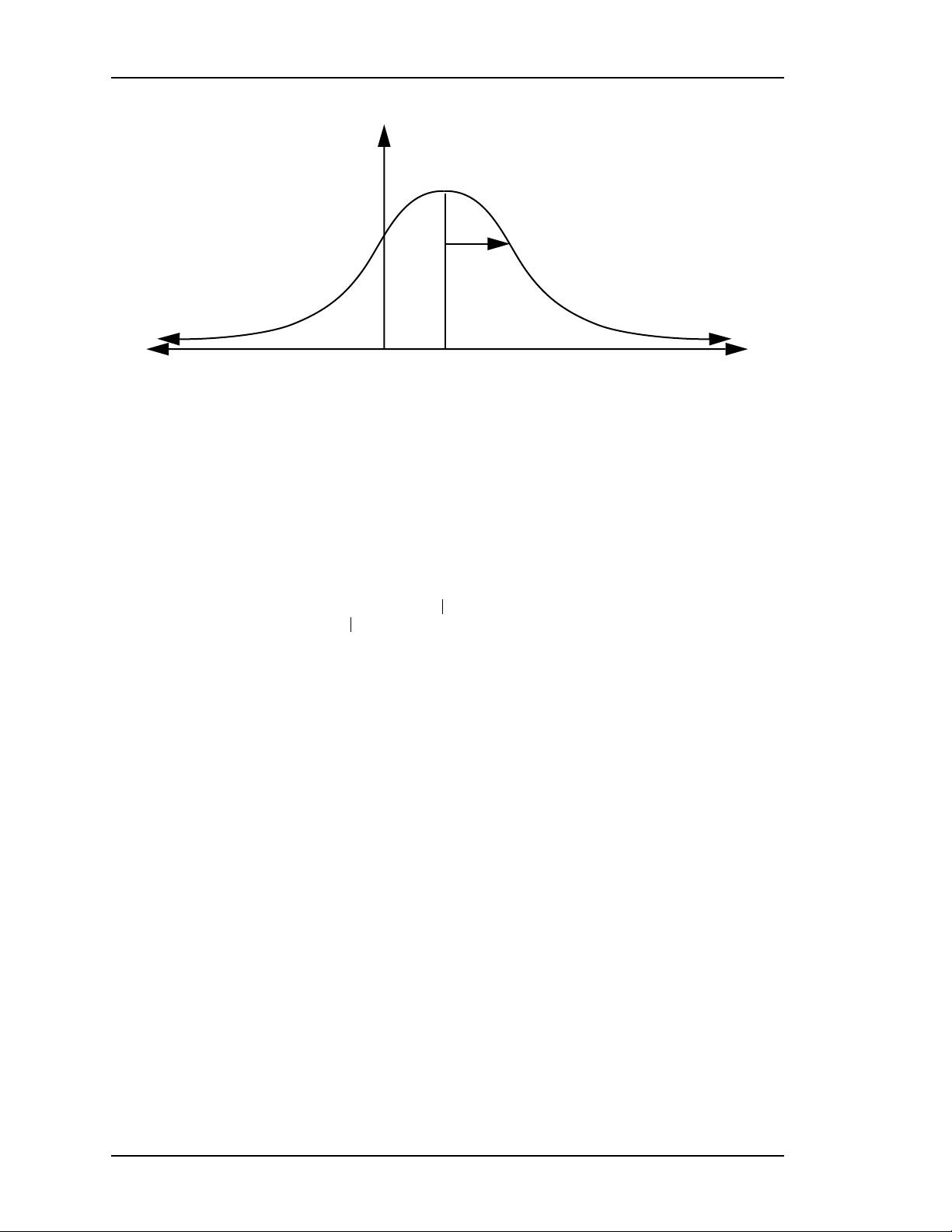
Figure 2.1: The Normal or Gaussian probability distribution function.
XY
f
XY
x()
f
YX
y()f
X
x()
f
Y
y()
-----------------------------------=
XY
XYy=
p
X
x | Yy=()
f
Y
y | Xx=()p
X
x()
f
Y
y | Xz=()p
X
z()
z
∑
-------------------------------------------------------=



剩余80页未读,继续阅读
2014-10-19 上传
2021-10-03 上传
108 浏览量
2021-05-31 上传
2011-03-04 上传
2023-03-28 上传
2019-10-08 上传
2021-02-11 上传
2022-08-08 上传

ghsatxidian
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
