




动态神经网络优化并行Stewart平台运动学冗余
PDF格式 | 2.09MB |
更新于2024-08-25
| 135 浏览量 | 举报
本文探讨了动态神经网络在并行Stewart平台运动学冗余解析中的应用,这是一项重要的控制问题。Stewart平台因其冗余特性,能够在设计上提升系统性能。作者将Stewart平台的运动学控制问题转化为一个约束二次规划问题,并利用拉格朗日乘子法将其转换到对偶空间,从而获取了问题的Karush-Kuhn-Tucker条件。
动态神经网络是核心解决方案,它被设计成能够递归地解决优化问题。通过理论分析,研究证明了所采用的动态神经网络在全球范围内,根据预定义的标准,能够收敛到最优解。这种方法特别适用于处理动态运动下Stewart平台的跟踪控制任务。
该研究的创新之处在于将数学优化理论与神经网络技术相结合,以实现并行Stewart平台的高效、精确控制。约束二次规划确保了控制的稳健性,而动态神经网络则提供了快速和灵活的学习能力,能够在实际操作中适应不断变化的运动需求。
文章的结果通过仿真验证了这种策略的有效性,表明动态神经网络不仅能够处理静态任务,对于处理复杂、动态的运动路径跟踪也有显著的优势。这对于工业自动化、机器人技术等领域,特别是在精密定位和高精度运动控制的应用中具有重要意义。
总结来说,本文的研究为并行Stewart平台的冗余度管理提供了一种新颖且高效的控制策略,展示了动态神经网络在解决这类问题上的潜力,有望推动并行机械臂技术的发展。
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
MOHAMMED AND LI: DYNAMIC NEURAL NETWORKS FOR KINEMATIC REDUNDANCY RESOLUTION 3
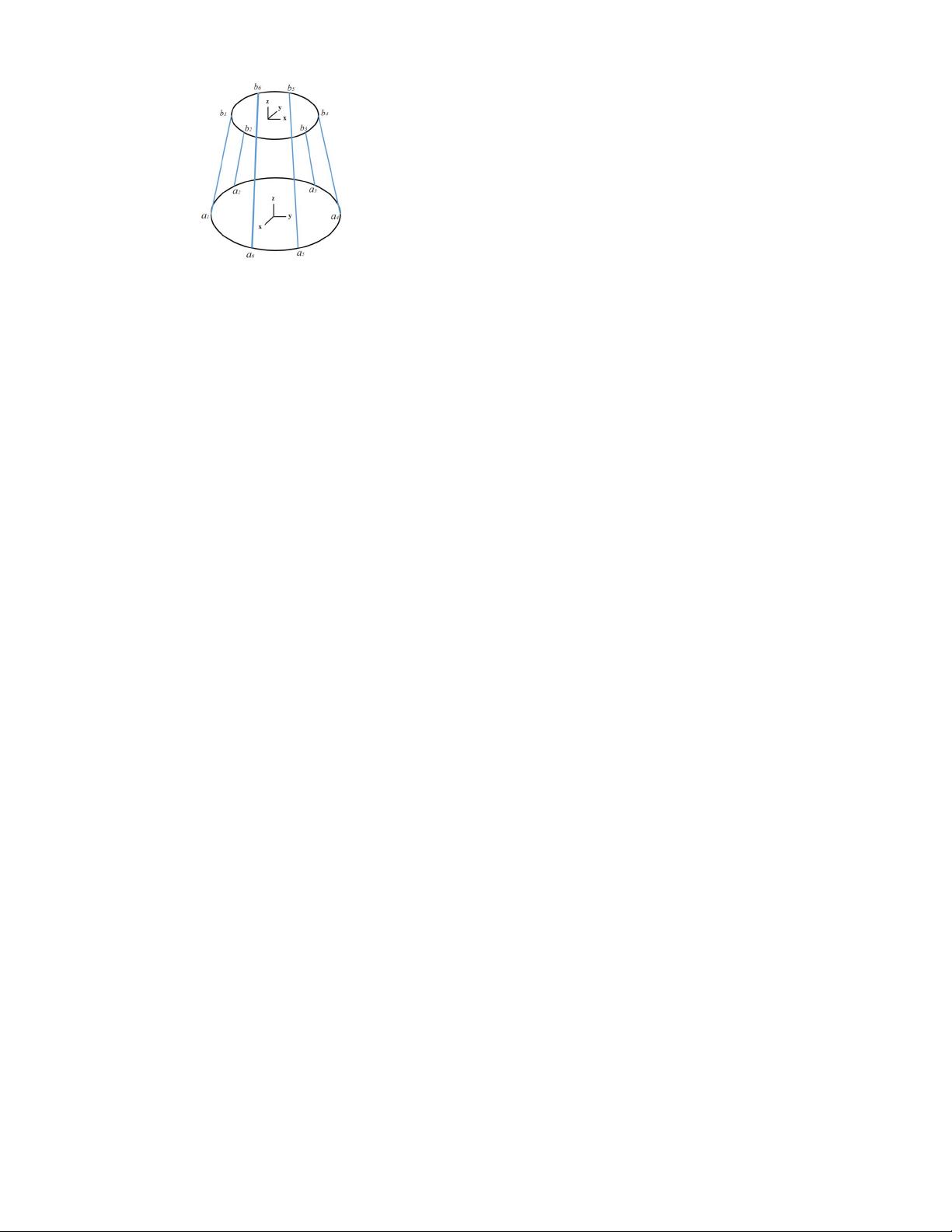
Fig. 1. Schematic of the Stewart platform.
Fig. 1, a fixed base, and six independent driving legs connect-
ing the aforementioned two parts. The two ends of each leg are
fixed on the mobile platform and the fixed based, respectively,
using universal joints. Each leg can be actuated to change
its length for the adjustment of the distance between the two
fixed points on the platform and the base. All together, the six
legs collaborates to adjust the orientation and position of the
mobile platform by changing their lengths.
A. Geometric Relation
For the Stewart platform, the global coordinate is fixed on
the base and the platform coordinate is fixed on the mobile
platform. a
i
∈ R
3
for i = 1, 2,...,6 represents the position
in global coordinates of the ith connection point on the base.
b
i
∈ R
3
for i = 1, 2,...,6 represents the position in platform
coordinates of the ith connection point on the platform. We use
b
i
to represents its position in the global coordinate, as shown
in Fig. 1. d
i
= b
i
− a
i
for i = 1, 2,...,6 represents the vector
corresponding to the ith leg, which points from the base to
the platform. For a point x
∈ R
3
in the platform coordinate,
its position x ∈ R
3
in global coordinate is obtained after a
rotational and translational transformation
x = p + Qx
(7)
where p = [x
p
, y
p
, z
p
]
T
∈ R
3
is the global coordinate of the
zero position in the platform coordinate, and it corresponds
to the translational transformation, Q ∈ R
3×3
is the rota-
tional matrix, which is uniquely defined by the Euler angles
θ = [θ
x
,θ
y
,θ
z
]
T
∈ R
3
Q = Q
z
Q
y
Q
x
Q
x
=
⎡
⎣
10 0
0 cos θ
x
sin θ
x
0 − sin θ
x
cos θ
x
⎤
⎦
Q
y
=
⎡
⎣
cos θ
y
0 − sin θ
y
01 0
sin θ
y
0 cos θ
y
⎤
⎦
Q
z
=
⎡
⎣
cos θ
z
sin θ
z
0
− sin θ
y
cos θ
y
0
001
⎤
⎦
. (8)
Following (7), as to the ith connection point on the platform,
i.e., the ones with x = b
i
in the global coordinates or the ones
with x
= b
i
in the platform coordinates, we have:
b
i
= p + Qb
i
. (9)
Therefore, the ith leg vector can be further expressed as
d
i
= b
i
− a
i
= p + Qb
i
− a
i
. (10)
For the vector d
i
, we define r
i
=d
i
to represent its length.
Accordingly, we have
r
i
=
p + Qb
i
− a
i
. (11)
Notice that both a
i
and b
i
are constants and are determined
by the geometric structure. p = [x
p
, y
p
, z
p
]
T
defines the trans-
lation of the platform, and Q as a function of the Euler angles
θ = [θ
x
,θ
y
,θ
z
]
T
, defines the rotation of the platform. Overall,
the right-hand side of (11) depends on the pose variables of
the platform π = [x
p
, y
p
, z
p
,θ
x
,θ
y
,θ
z
]
T
∈ R
6
while the left-
hand side of (11) is the length of the leg, which is controlled
for actuation. In this sense, (11)fori = 1, 2,...,6 defines the
kinematic relation between the actuation variables and the pose
variables. For a six-dimensional reference pose, the desired leg
length r
i
can be directly obtained from (11). However, in real
applications, the reference are usually not six-dimensional. For
example, for surgical applications of Stewart platform, peo-
ple may only care about the position of an end-effector on
the platform, instead of its orientation. In this situation, the
reference is 3-D and we have three additional DOF as redun-
dancy. For such a situation, we usually have infinite number
of feasible solutions of r
i
for i = 1, 2,...,6 to reach the
reference. Among the feasible solutions, we may be able to
identify one, which outperforms others in terms of certain opti-
mization criteria. This intuitive analysis motivate us to model
it as an optimization problem and identify the optimal one
for improved performance. However, due to the nonlinear-
ity of (11), direct treatment of (11) is technically prohibitive.
Instead of direct solution in position space, we turn to solve
the problem in its velocity space to exploit the approximate
linearity.
B. Velocity Space Resolution
For easy treatment, (11) is rewritten as
r
2
i
=
p + Qb
i
− a
i
T
p + Qb
i
− a
i
. (12)
To obtain the velocity space relations, we first compute time
derivative on both sides of (12), which yields
r
i
˙r
i
=
p + Qb
i
− a
i
T
˙p +
˙
Qb
i
+ Q
˙
b
i
−˙a
i
=
p + Qb
i
− a
i
T
˙p +
˙
Qb
i
. (13)
Recall that both a
i
and b
i
are constants and their time deriva-
tives, ˙a
i
and
˙
b
i
, equal to zero. For the rotational matrix Q,
according to the preliminary equations (1) and (6), it has the
following property for its time derivative:
˙
QQ
T
=
⎡
⎣
0 −
˙
θ
z
˙
θ
y
˙
θ
z
0 −
˙
θ
x
−
˙
θ
y
˙
θ
x
0
⎤
⎦
=
⎡
⎣
˙
θ
x
˙
θ
y
˙
θ
z
⎤
⎦
×
=
˙
θ
×
. (14)
Therefore,
˙
Q writes as follows:
˙
Q =
˙
θ
×
Q
T
−1
=
˙
θ
×
Q. (15)
下载后可阅读完整内容,剩余12页未读,立即下载
相关推荐



weixin_38562130
- 粉丝: 10
 我的内容管理
展开
我的内容管理
展开








最新资源
- XCP协议族标准文档介绍与核心规范解析
- Maya-sniffer:高效可视化管理Maya场景文件
- 深入解析JsonExt压缩包文件及其应用
- SpringMVC项目必备的jar包清单
- 深入探讨Delphi7中的ImageButton控件
- J2EE教程中文版:深入学习企业级Java应用开发
- EditASM:高效的单片机汇编语言编辑器
- ESP8226继电器固件实现局域网网页远程控制
- RDH2159 PCI转串并口驱动安装及兼容性
- 安卓五子棋游戏开发及源码解析
- NTRViewer: PC端流媒体查看器的NTR CFW支持
- 徕卡全站仪数据转换采集解决方案
- 初学者必玩:XNA平台下的赛车游戏RunCar
- MATLAB实现三维装箱问题的近似算法
- .NET实现TGA文件循环播放技术探讨
- KIO-Cloud: 统一云存储服务的创新解决方案






















