安川机器人视觉通信教育详解
版权申诉
"该资源是关于安川机器人视觉通信教育的PPT,主要涵盖了视觉通信的基本概念、实例、实现方式以及以太网通信的相关协议,适用于希望通过机器人视觉系统提升自动化水平的学习者或工程师。"
在视觉通信教育中,安川电机(中国)有限公司介绍了视觉通信的定义和作用。视觉通信是指利用相机通过特定的通信协议,如安川机器人支持的协议,与机器人进行数据交互,实现如位置抓取和外观检测等功能。这一技术能促进机器人与外部设备的协同作业,尤其在工业生产中,能够提高自动化程度和生产效率。
视觉通信的方式主要有两种:通过LAN Cable和USB Cable。第一种方式,相机通过专用的控制柜与机器人控制柜连接,数据经由网线传输,这种方式配置简单,但成本较高。第二种方式,相机与电脑相连,由电脑处理图像数据后再传给机器人控制柜,这种方式具有较高的灵活性和性价比,但需要更多的编程和调试工作。
在当前的视觉通信现状中,MotoPlus功能和以太网功能是必需的选项。MotoPlus是安川机器人的一种通信接口,它允许用户通过编程控制机器人。以太网通信则使得机器人可以通过网络与PC或其他智能设备进行通信,无需额外硬件,可以实现读写机器人IO、变量、位置坐标等,并控制机器人的运动。
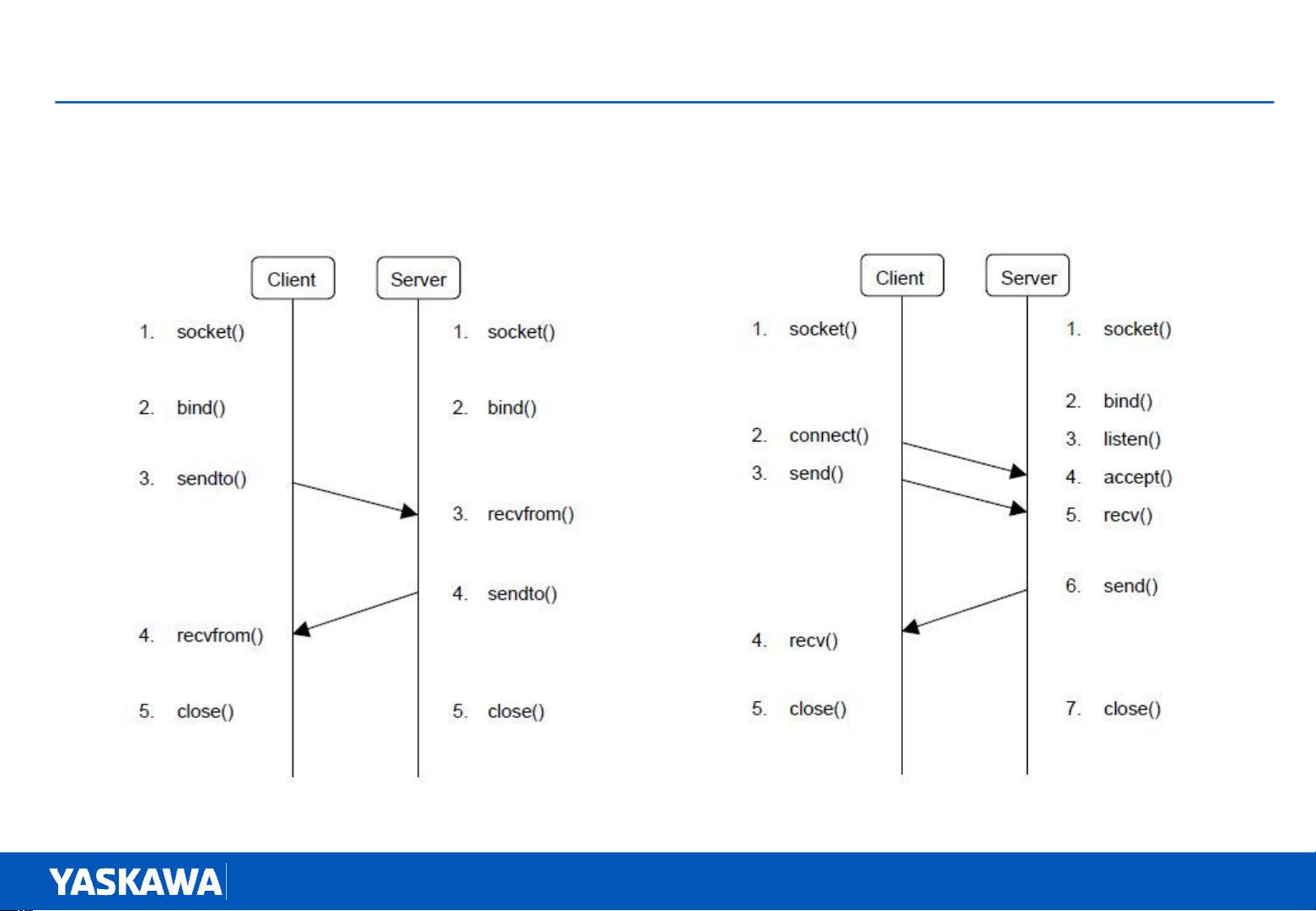
以太网通信协议包括UDP (User Datagram Protocol) 和TCP (Transmission Control Protocol)。UDP通信提供高速数据传输,适用于实时性要求高的应用,而TCP则提供更可靠的连接,确保数据的正确传输,适合对数据完整性和顺序有要求的场景。在实际应用中,开发者可以根据具体需求选择合适的通信协议,并使用C/C++/C#/VB/LabView等编程语言编写相应程序。
这份教育资源详细阐述了安川机器人的视觉通信技术和以太网通信的运用,对于学习者理解如何集成视觉系统和机器人控制,以及如何利用以太网协议进行高效通信有着重要的指导价值。
安川電機(中国)有限公司
7
•
以太网通信的定义:机器人通过网线与 PC 或者智能设备连接,进行通信的一种方式。
•
以太网通信的设定:在机器人上开通对应功能。
•
以太网通信的特点:
•
只需要连接网线,不需要增加额外硬件
•
可读写机器人 IO 、变量、位置坐标、程序内容等数据
•
可以控制机器人的运动
•
需要编写程序( C/C++/C#/VB/LabView 等)
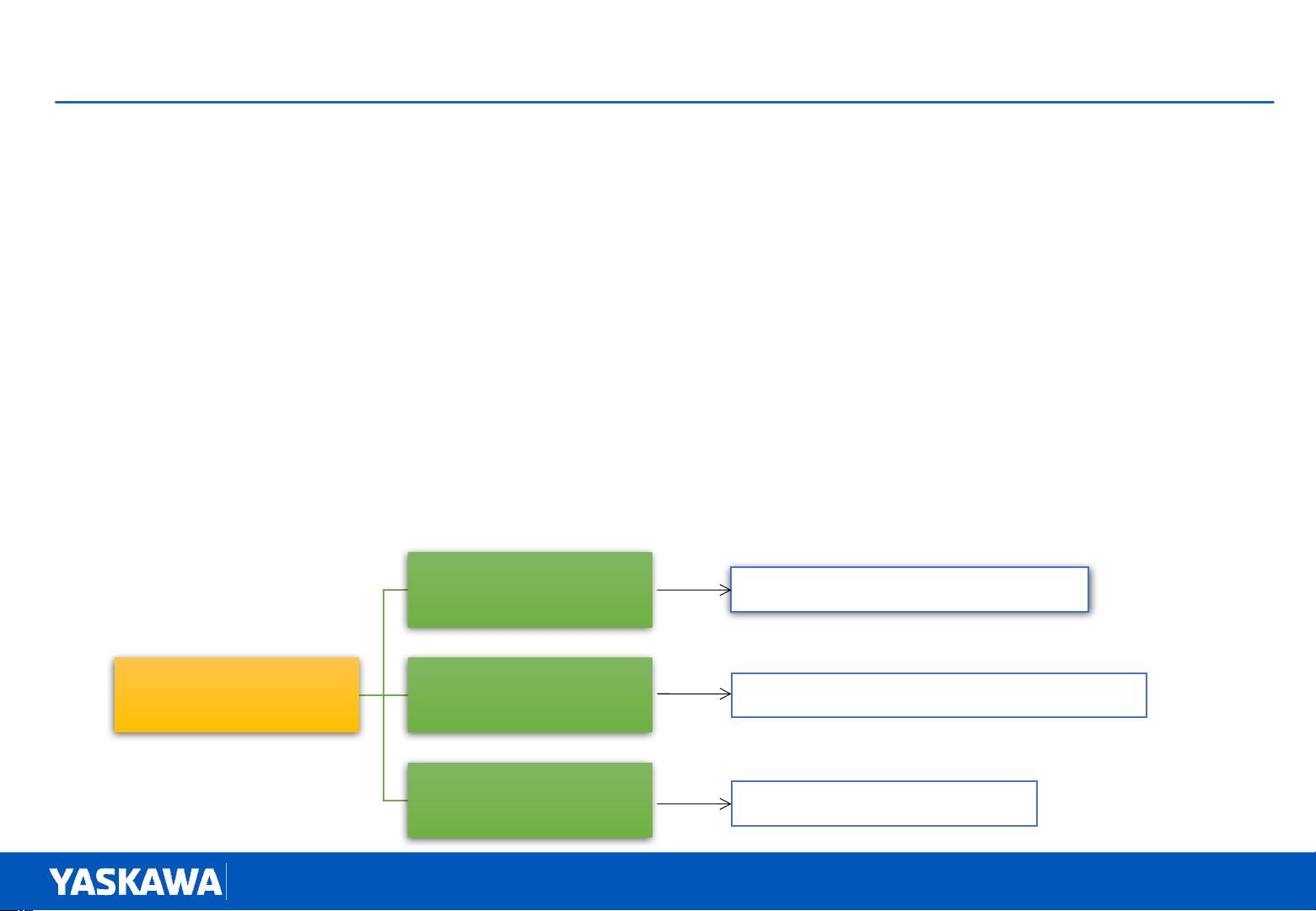
以太网通信的协议
以太网通信
TCP
UDP
Motoplus
需要开通以太网服务器功能
需要开通高速以太网服务器功能
需要使用 MotoPlus 软件
剩余35页未读,继续阅读
2022-05-08 上传
2022-05-09 上传


工业机器人技术支持
- 粉丝: 5
- 资源: 15
 我的内容管理
展开
我的内容管理
展开







