CloudCompare 2.6.1:3D点云处理软件用户手册
需积分: 9 117 浏览量
更新于2024-07-20
收藏 15.07MB DOCX 举报
CloudCompare是一款强大的三维点云(Point Cloud)编辑和处理软件,其版本更新至2.6.1,旨在为用户提供全面的点云操作体验。这款工具最初设计的初衷是用于密集三维点云之间的直接比较,其核心是独特的八叉树结构,这使得在执行这类任务时能够实现高效的性能。考虑到许多点云数据主要由激光扫描仪采集,其规模通常非常庞大,比如早期版本的CloudCompare就足以处理超过1000万点的数据集(2005年时的标准配置)。
随着软件的发展,CloudCompare的功能不断扩展,不仅支持点云与三角网格(Triangular Mesh)的对比,还引入了一系列关键的点云处理算法。这些功能包括:
1. **点云配准(Registration)**:通过精确的配准技术,将不同来源或时间的点云数据对齐,以便进行后续分析和融合。
2. **重采样(Resampling)**:对点云进行密度控制,提高数据精度或减少冗余,优化处理效率。
3. **颜色、法线向量和标量场管理**:赋予点云更丰富的视觉表达,便于理解形状和纹理特征。
4. **统计计算(Statistics Computation)**:提供对点云属性的统计分析,如密度分布、高度分布等。
5. **传感器管理(Sensors Management)**:支持不同类型传感器数据的整合,确保数据的一致性和准确性。
6. **交互式和自动分割(Interactive or Automatic Segmentation)**:用户可以根据需要手动或通过算法自动划分点云,以识别不同的几何结构或对象。
7. **显示增强(Display Enhancement)**:包含自定义颜色渐变、颜色和法线矢量处理、校准图片处理、OpenGL着色器、插件等功能,提升可视化效果。
举例来说,对于300万个点与一个包含14,000个三角形的网格进行距离计算,CloudCompare能够在大约10秒内完成,这显示出其在处理大规模点云时的高效性能。
CloudCompare不仅是一个用于点云对比的工具,它已经发展成为一个全面的点云处理平台,适应了从数据获取、预处理到高级分析的各个环节,为用户提供了强大的数据分析和可视化能力。无论是在考古、建筑、地理信息系统(GIS)还是工业制造领域,CloudCompare都是一款不可或缺的专业软件。
-
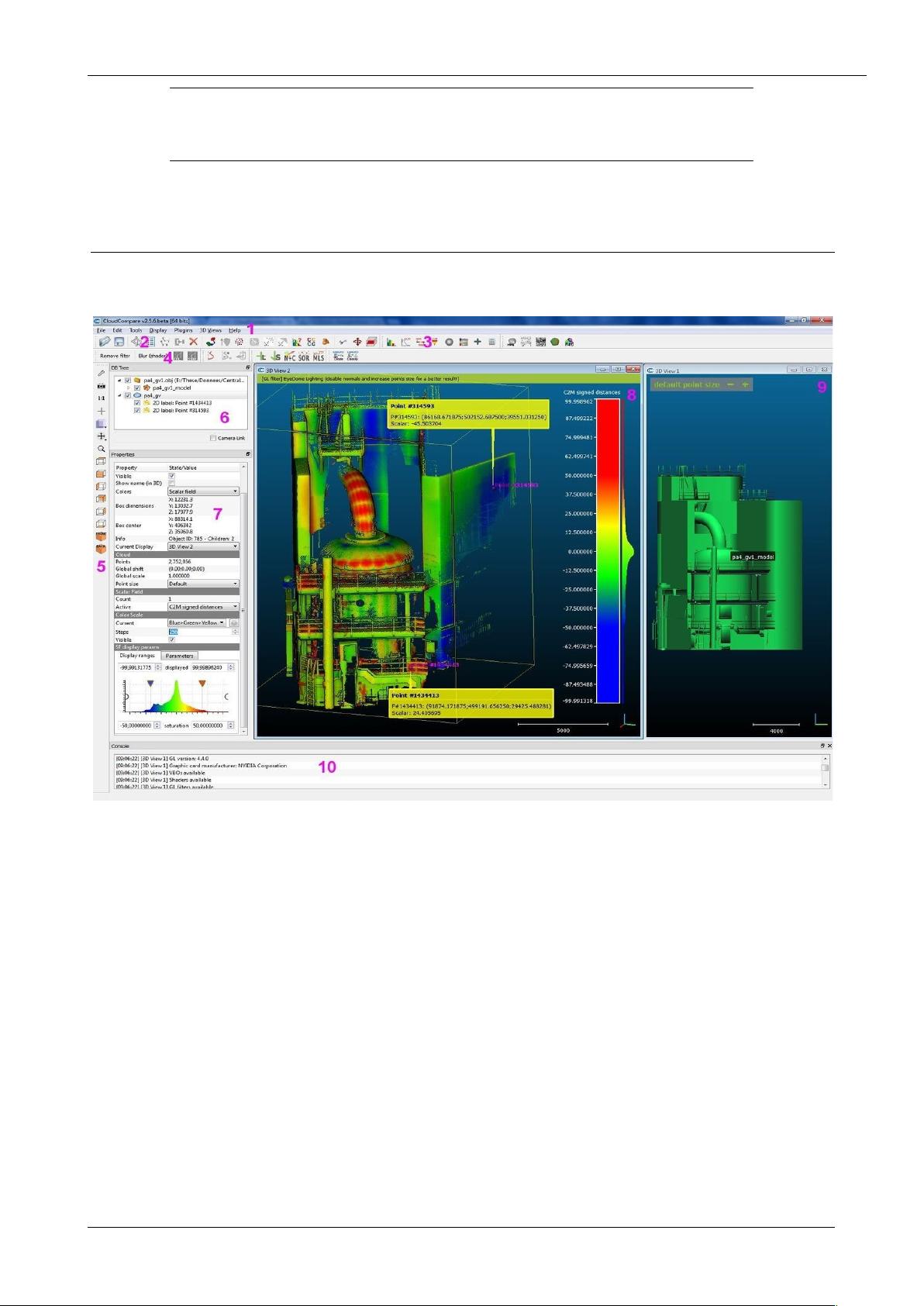
General concepts
Graphical User Interface
A9((%..P
;?N(NAN@
/?.#NNN@
"?&N&NGN@
1?#@
&?&@
01%?01(%&@
?!NN@
!?A9&&P>(N9&NN@
0 !?A9@
8 &!?A9&#)*%@
3 %!?A9#@
1!?.(..@
(%?.@
1.01(%
) :01(%?%+(,-@
- 4
44R
剩余63页未读,继续阅读
2018-09-18 上传
2020-04-09 上传
2023-12-02 上传
2023-09-01 上传
2024-01-17 上传
2023-08-31 上传
2024-01-12 上传
2023-12-15 上传

Storming2011
- 粉丝: 27
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
