"ROS学习资料-节点的角色与分布式管理"
需积分: 5 120 浏览量
更新于2024-01-23
收藏 1.92MB DOCX 举报
在ROS(Robot Operating System,机器人操作系统)中,节点(node)是最小的进程单元。一个功能包(package)可以包含多个可执行文件,而这些可执行文件在运行后就成为了进程,在ROS中被称为节点。从程序角度来说,节点就是一个可执行文件,通常是C编写的可执行文件或者Python脚本,被执行后加载到内存中。从功能角度来说,一个节点通常负责机器人的某一个单独的功能。
由于机器人的功能模块非常复杂,我们往往不会把所有功能都集中到一个节点中,而会采用分布式的方式,将不同的功能放置在不同的节点中。举例来说,可以有一个节点来控制底盘轮子的运动,一个节点用于驱动摄像头获取图像,另一个节点用于驱动激光雷达,还有一个节点根据传感器信息进行路径规划等等。这样做的好处是可以降低程序发生崩溃的可能性。如果将所有功能都写到一个程序中,模块之间的通信和异常处理将会非常繁琐。
机器人的元器件众多,功能庞大,因此在实际运行时往往会运行众多的节点,负责感知世界、控制运动、决策和计算等功能。如何合理地进行调配和管理这些节点成为了一个重要的问题。
在ROS中,Master是一个提供了节点发现和通信的中心化管理节点。Master维护着一个节点的注册表,记录所有已经运行的节点,并提供节点间的通信方法。每个节点在运行之前都需要向Master注册自己的信息,包括节点的名称、主题(topics)和服务(services)等。在运行时,节点可以通过Master查询其他节点的信息,并根据需要与其他节点进行通信。
节点间的通信通过主题和服务来实现。主题是一种发布-订阅的模式,一个节点可以将消息发布到某个主题上,而其他节点可以订阅该主题,以接收到发布的消息。服务则是一种请求-响应的模式,一个节点可以向某个服务发起请求,另一个节点会对该请求进行处理并返回响应。通过主题和服务,节点之间可以实现数据的共享和交互。
为了更好地管理和调度节点,ROS提供了一些工具和技术。例如,可以使用命令行工具roslaunch来启动一个包含多个节点的功能包,同时配置节点的参数和启动顺序。也可以使用rviz这样的可视化工具来监控和调试节点的运行状态。此外,ROS还支持节点的远程通信和调试,可以在不同的计算机上运行不同的节点,并通过网络进行通信和数据交换。
总之,节点是ROS中最小的进程单元,负责实现机器人的各种功能。通过将不同的功能放置在不同的节点中,可以降低程序发生崩溃的可能性,并提高系统的可靠性和可维护性。通过主题和服务,节点之间可以进行数据的共享和交互。合理地调配和管理节点是保证机器人系统正常运行的关键。ROS提供了一些工具和技术来帮助管理和调度节点,提供了一种灵活且可扩展的机制,使得机器人系统的开发和调试变得更加方便和高效。
3.3.2 CMakeLists.txt 文件修改
在完成了节点源码编写之后,需要修改 test_pkg 包下的 CMakeLists.txt 文
件(具体路径为:ros_workspace/src/test_pkg/CMakeLists.txt ),将编辑的源
码生成可执行文件。
需要修改以下两条指令:
add_executable(${PROJECT_NAME}_node src/test_pkg_node.cpp)
该条指令用于指定将该功能包 src 目录下的哪个源文件编译为可执行程序,
其中:
${PROJECT_NAME}_node 为生成可执行程序的名字,该名字可以任意指定。
src/node.cpp:为编译要使用的源码的文件名。
target_link_libraries(${PROJECT_NAME}_node
${catkin_LIBRARIES}
)
该条指令用于指定所使用的一些链接库。其中:
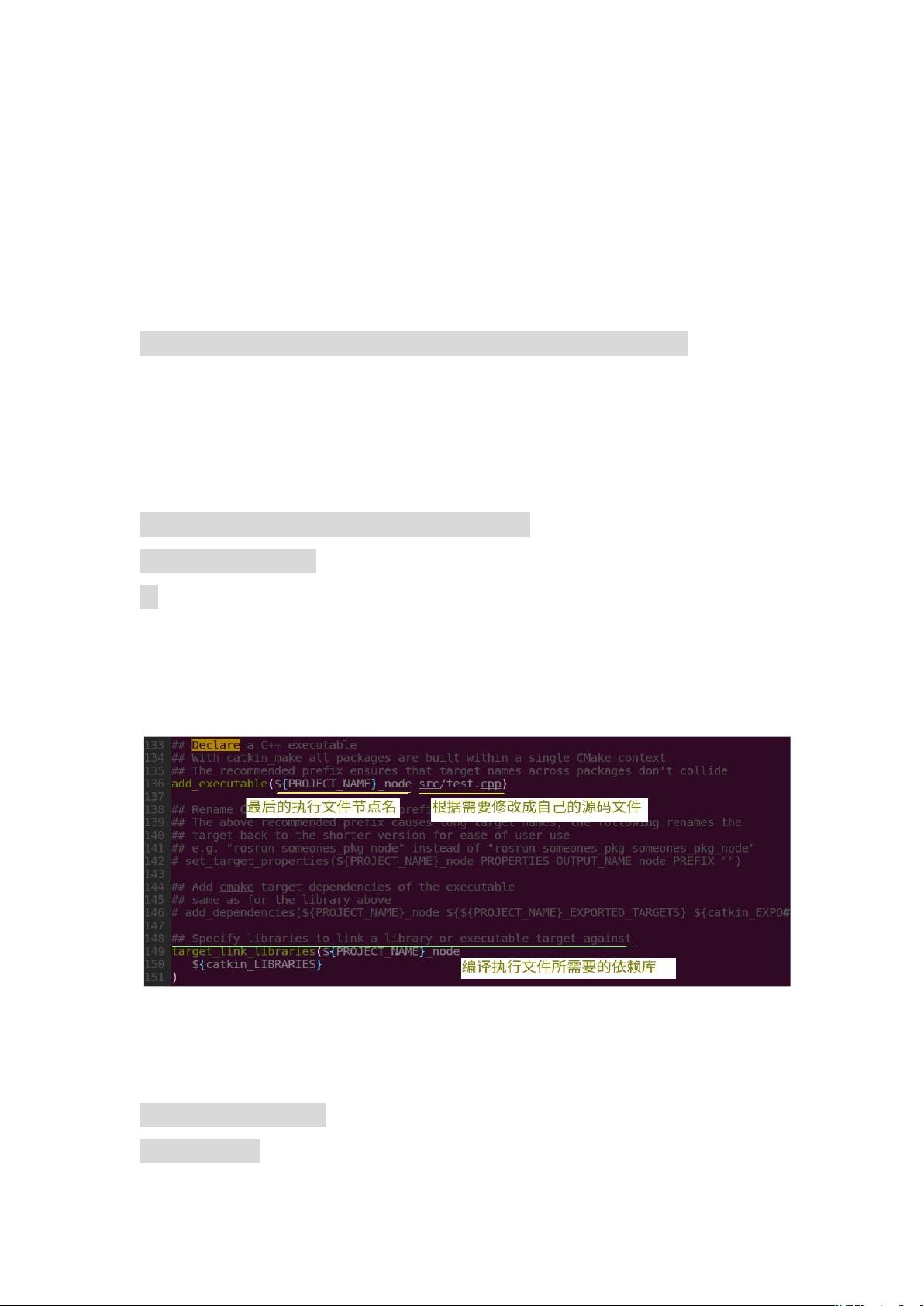
${PROJECT_NAME}_node 是在 add_executable 中生成的可执行文件。如下图
3.1 所示为修改完成的 CMakeLists.txt 文件。
图 3.1 CMakeLists.txt 修改
当修改完 CMakeLists.txt 文件后 就可以在工作空间的根目录下 使用 catk
in_make 进行编译了。
$ cd ~/ros_workspace
$ catkin_make
剩余19页未读,继续阅读
2023-04-18 上传
2021-04-12 上传
2023-04-20 上传
131 浏览量
2023-04-20 上传

孙兔子
- 粉丝: 606
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- gcp-gists
- aontu:统一者
- Python语言学习、人工智能研究等
- HistoryBlock:适用于FireFox Web浏览器的HistoryBlock插件
- 易语言-出生时间转农历生日计算器
- 利用Lab VIEW软件制作的曲线拟合程序.rar
- StructuresandAlgorithms-Code:重温数据结构与算法,代码实践
- Angular和Parse.com中的约束和验证
- react-app28237225523826703
- swift个人项目实战学习
- django-recaptcha:Django reCAPTCHA表单fieldwidget集成应用程序
- 易语言-FileSystemObject 通过对象操作文件目录及文本读写
- python-utils
- LogViewPro日志查看器.zip
- 起始页:起始页
- 使用SignalR创建实时系统通知
