云端大数据基础设施与实践:微软Azure解决方案
需积分: 10 177 浏览量
更新于2024-07-16
收藏 2.55MB PDF 举报
"这篇文档是关于云端大数据基础设施的实践,主要介绍了大数据的特点,以及如何利用云平台,如Azure,来支持大数据的存储、处理和分析。文档作者董乃文是微软开发工具及平台事业部的成员,探讨了大数据的三个关键属性:数据规模、数据种类和数据速度,并详细阐述了云端如何应对这些挑战。"
正文:
大数据,作为现代信息技术领域的一个核心概念,是指那些在传统数据处理应用中无法有效捕获、管理或分析的大量、快速和多样化的信息资源。这篇文档深入探讨了大数据如何与云计算相结合,以提供高效、灵活且经济的数据处理能力。
1. 数据规模(Data Volume):
大数据的关键特征之一就是其庞大的量级。文中提到,文件存储在分布式容错文件系统中,这种架构允许数据在多服务器之间分布,实现跨节点的存储,以支持超大规模的数据。通过在云端扩展至数千个节点,可以实现线性的存储伸缩,满足不断增长的数据需求。例如,Azure的存储服务和HDInsight提供了这样的弹性扩展能力。
2. 数据种类(Data Variety):
大数据不仅关注量,也关注数据的多样性。非结构化数据,如文本、图像、视频等,占据了大数据的大部分。在云端,如Azure的DocumentDB等服务可以支持存储半结构化和非结构化数据,使得企业能够挖掘这些数据中的潜在价值。通过数据科学和分析技术,可以揭示隐藏的模式和洞察,例如通过情感分析理解客户反馈,通过点击流分析优化网页设计,或者通过日志分析提升系统性能和安全性。
3. 数据速度(Data Velocity):
实时处理和分析数据流是大数据处理的另一大挑战。Azure的Stream Analytics等服务提供了实时数据流处理的能力,可以接收和处理大量事件,用于近实时的决策制定。这种速度对于物联网(IoT)场景尤其重要,例如通过传感器数据流分析设备状态,或者通过位置数据进行地理信息分析。
此外,文档还提到了Azure的基础设施层级,包括订阅、位置、资源组、存储账户、虚拟网络等,这些构成了云端大数据解决方案的基础架构。虚拟机(VM)在可用性集和负载均衡器的支持下,确保了高可用性和容错性,而网络安全组则保障了数据的安全。
这篇文档详细阐述了云端大数据基础设施的实践,展示了如何利用云平台来应对大数据的挑战,为企业提供了存储、处理和分析大数据的全面解决方案。通过云服务,如Azure,可以实现大数据的高速度、高伸缩性、经济性和高可用性,同时保持开放和灵活的特性,以适应快速变化的数据需求。
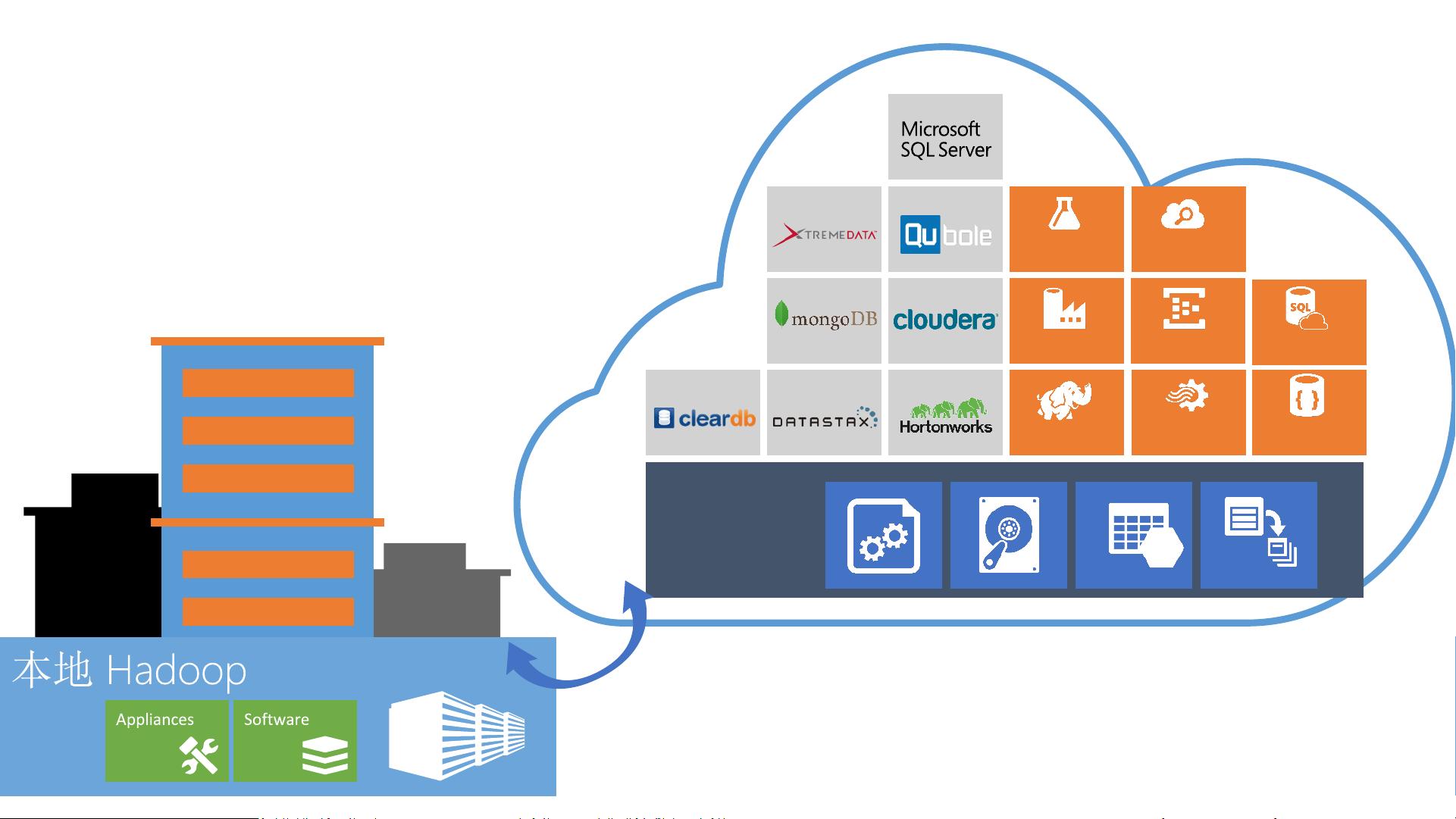
大数据生态圈迈向云端
Azure
Storage
HDInsight
Data Factory
ML
Stream
Analytics
Database
DocumentDB
Search
Event Hubs
剩余29页未读,继续阅读
2021-10-10 上传
2023-09-09 上传
2023-06-26 上传
2023-07-13 上传
2023-09-23 上传
2023-10-03 上传
2023-06-09 上传
2023-04-29 上传
2023-07-15 上传

qq_41615520
- 粉丝: 0
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
