ZX08023机器人操作与编程指南
版权申诉
42 浏览量
更新于2024-06-23
收藏 11.98MB DOC 举报
"ZX08023通用型机器人使用说明书.doc"
该文档详细介绍了ZX08023通用型机器人的操作与编程方法,包括导航、编程、存档、恢复、专家模式以及校零和坐标系等核心知识点。
1. 导航与编程:
- 键盘导航: 用户可以通过键盘进行程序的控制和操作。
- 新建程序: 提供了创建新程序的步骤,允许用户根据需求编写机器人动作序列。
- 编程状态: 显示当前编程环境的状态,帮助用户了解机器人是否处于可编程模式。
2. 存档与恢复:
- 存档: 用户可以将重要数据以ZIP格式存储到软盘,确保数据安全。
- 存档(所有): 保存包括机械数据、工具/基座数据、应用软件在内的全部系统数据。
- 存档单个程序: 只保存选定的程序,方便单独管理。
- 恢复所有: 将软盘中的所有数据恢复到硬盘,用于系统还原。
- 恢复单个程序: 仅上传并恢复选定的程序到硬盘。
3. 专家模式:
- 导航(专家): 提供了更高级别的导航选项,可能包含更多自定义设置和专业功能。
- 导航中的附加图标(专家): 包含驱动器、目录和文件等高级查看和管理工具。
- 创建新模块(专家): 允许用户创建自定义功能模块,扩展机器人功能。
- 错误显示和错误列表: 提供详细的错误信息,便于诊断和修复问题。
4. 校零:
- 机械零点: 校零确保机器人各轴能到达准确的初始位置。
- 校零装置: 介绍如何使用校准设备进行校零操作。
- 量具筒横截面: 显示校零工具的结构和工作原理。
- 控制运行过程示意: 图解校零过程,指导用户正确操作。
- EMT校正: 使用专用设备(如EMT)进行轴的精确校正,包括预校正位置、操作步骤和LED状态指示。
5. 坐标系:
- 轴的精确移动: 用户可以手动或使用空间鼠标精细控制每个轴的运动。
- 全局坐标系: 固定的直角坐标系,用于定义机器人的全局位置。
- 直角坐标系中旋转角的分配: 解释各轴在坐标系中的旋转方向。
- 右手法则: 帮助理解坐标系的正负方向,便于理解机器人的运动路径。
这份文档是ZX08023通用型机器人的全面指南,为用户提供了从基础操作到高级功能的详尽教程,无论是初次使用者还是经验丰富的程序员都能从中受益。通过遵循手册的指导,用户能够高效地编程、维护和优化机器人系统。
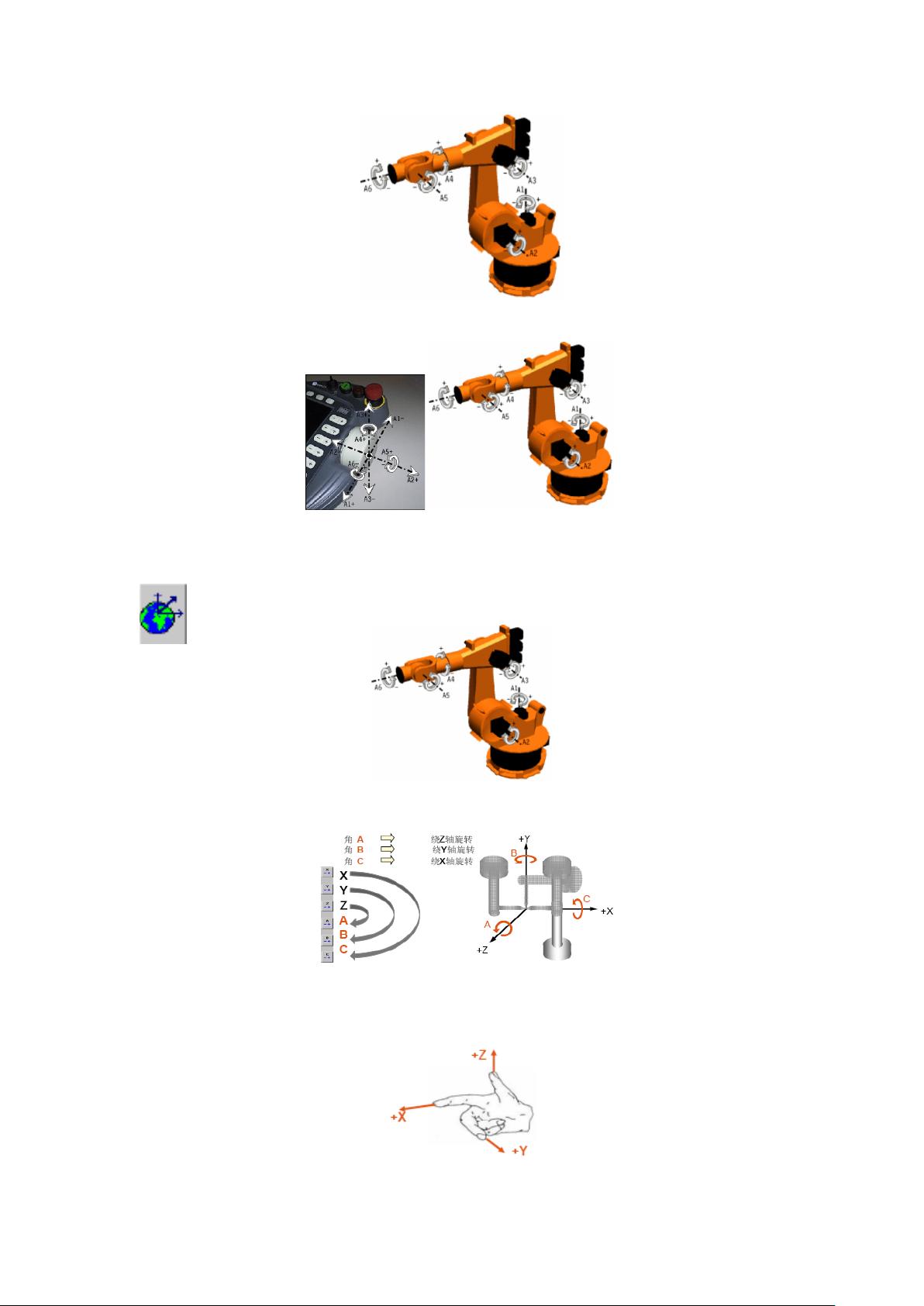
4.1.2 用空间鼠标使轴精确运动
4.2 全局坐标系
4.2.1 全局坐标系
固定的直角坐标系,原点在机器人基座上.
4.2.2 直角坐标系中旋转角的分配
4.2.3 右手法则 (坐标系方向)

剩余48页未读,继续阅读
2022-06-11 上传
2024-10-24 上传
2024-10-24 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
