CAN总线通信协议解析:从标准到扩展格式
"CAN总线通信协议中文版"
CAN(Controller Area Network)总线是一种广泛应用的车辆和工业自动化领域的通信协议,其设计目的是提供可靠、实时的多节点通信。CAN总线协议分为两个主要版本,即CAN 1.2和CAN 2.0,而CAN 2.0进一步分为A部分和B部分。CAN 2.0 B部分引入了扩展报文格式,以提供更大的标识符范围,从11位增加到29位,满足更多复杂系统的通信需求。
在CAN总线通信中,报文格式是关键组成部分。报文由多个字段构成,包括仲裁字段(用于确定发送优先级)、控制字段、数据字段以及校验字段。仲裁字段在标准格式下包含11位标识符,而在扩展格式下则包含29位标识符。标准格式通常适用于简单系统,而扩展格式适用于需要更精细消息区分的复杂系统。
CAN总线通信中存在几种不同的帧类型,包括数据帧、远程帧、错误帧和过载帧。数据帧用于实际数据的传输,远程帧用于请求其他节点发送数据,错误帧用于报告通信中的问题,过载帧则用于延长帧间隔时间,帮助网络稳定。
报文的发送和接收涉及到节点之间的竞争和仲裁机制。在多个节点同时发送报文时,CAN总线通过比较仲裁字段的位来决定哪个节点获得优先权,高位优先级更高。当检测到错误时,节点会发出错误标志,以通知网络上的其他节点。
报文的校验通过CRC(循环冗余校验)实现,确保数据在传输过程中的完整性。编码方面,CAN总线使用非归零反相(NRZI)编码,其中每个逻辑位的翻转表示数据位的改变,而连续的相同位表示数据位不变。
错误处理是CAN协议的重要部分,它包括错误检测和错误标定。当节点检测到错误时,它会进入错误状态,并通过发送错误标志来通知其他节点。故障界定(Bus Off)状态是错误管理的一个阶段,当一个节点累积过多错误时,它会被网络隔离,以防止干扰其他正常通信。
位定时要求是确保CAN总线通信可靠性的关键因素。CAN协议规定了最小和最大位时间,以适应不同速度的节点和线路条件。此外,CAN振荡器的容差设计允许节点之间有微小的时钟差异,以确保同步。
CAN总线通信协议提供了一套高效、可靠的多节点通信解决方案,特别适合于需要实时性和高容错性的应用环境。理解和掌握CAN协议的各个组成部分对于开发和维护基于CAN总线的系统至关重要。
广州周立功单片机发展有限公司 Tel: 020-38730976 38730977 Fax:38730925 http://www.zlgmcu.com
- 7 -
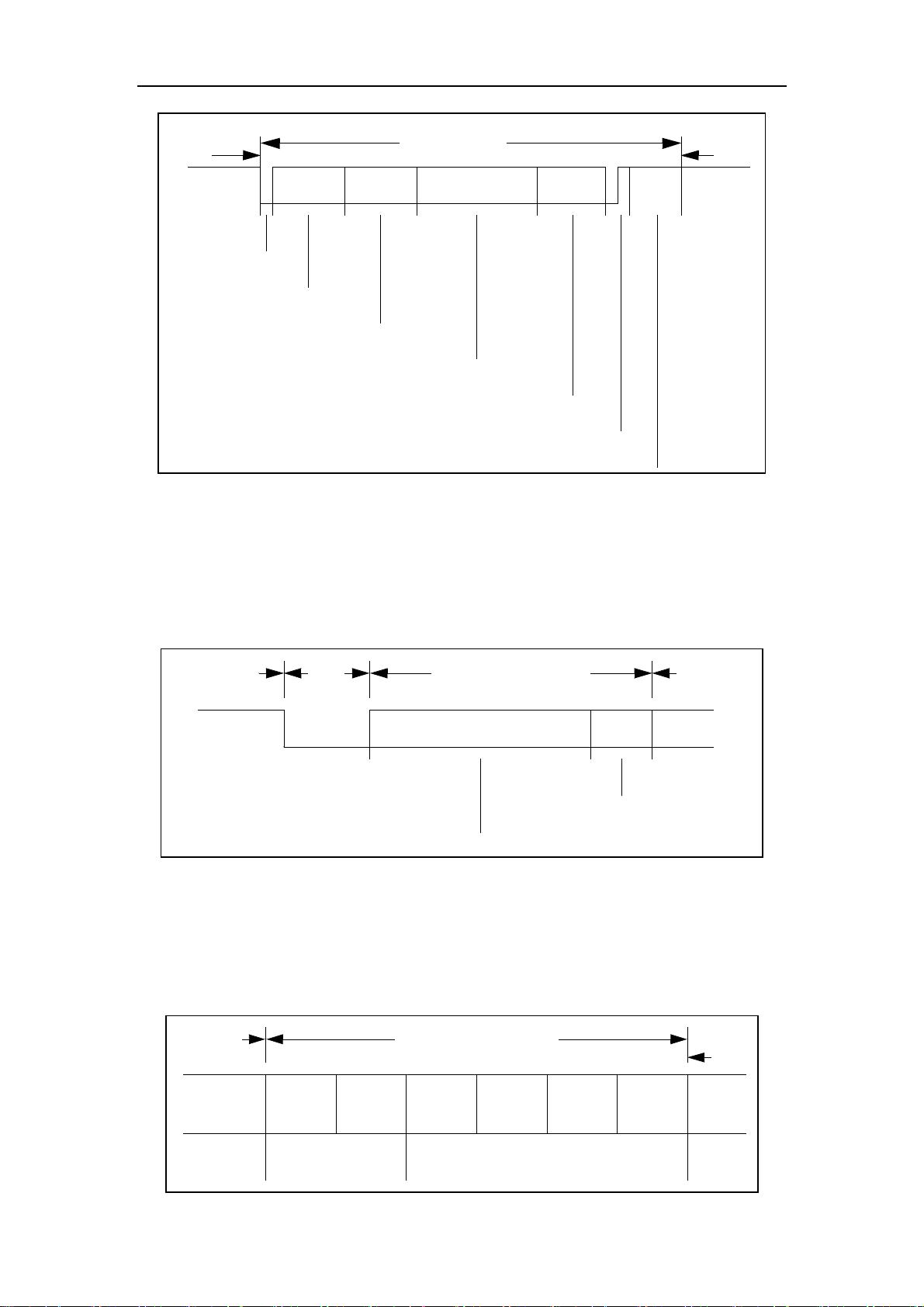
Interframe
Space
Interframe
Space
Start of Frame
Arbitrat ion Field
Cont rol Field
Data Field
CRC F i el d
AC K F ield
End of Frame
or
Overload
Fr a me
DATA F RAME
仲裁场
仲裁场包括识别符和远程发送请求位(RTR)。
识别符:识别符的长度为 11 位。这些位的发送顺序是从 ID-10 到 ID-0。最低位是 ID-0。最高的 7 位
(ID-10 到 ID-4)必须不能全是“隐性”。
RTR 位:该位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
Interframe
Space
St a r t
of Frame
Identifier
RT R B i t
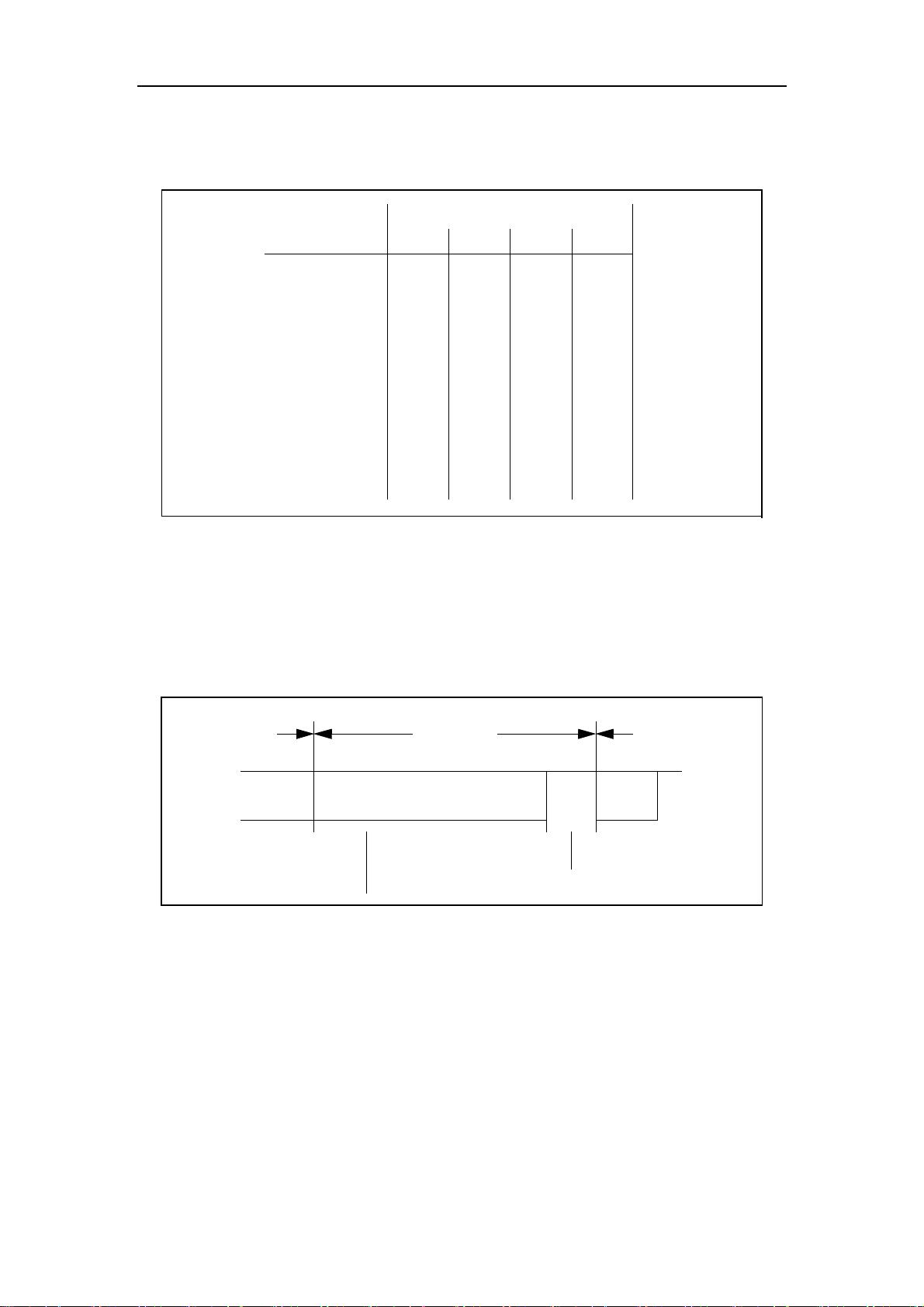
Co n t r o l
Fi e ld
AR BI TRATION F IELD
控制场
控制场由 6 个位组成,包括数据长度代码和两个将来作为扩展用的保留位。所发送的保留位必须为“显
性”。接收器接收所有由“显性”和“隐性”组合在一起的位。
数据长度代码:数据长度代码指示了数据场中字节数量。数据长度代码为 4 个位,在控制场里被发送。
r1 r0 DLC3 DLC2 DLC1 DLC 0
or
CRC
Fi e l d
Ar bit ration
Fi e l d
Dat a
Fi e l d
CO N T RO L F IE L D
Dat a Lengt h Codereserved
bits
剩余35页未读,继续阅读
350 浏览量
271 浏览量
423 浏览量
526 浏览量
251 浏览量
2021-02-03 上传

langjitianyademao
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- AN1299_Source_Code_dsPIC33CK256MP508_MCLV_MCHV_PLL_ESTIMATOR.zip
- 算法问题:存储我解决的部分算法问题
- Examcookie-crx插件
- 篮球赛工作总结下载
- movie-frontend
- l love youc#版.zip
- 下周:App ECOLETA,下周火箭比赛
- 公益小站-crx插件
- java版sm4源码-alg-sm2-demo:SM2密码算法JAVA调用演示程序
- java se写的坦克游戏.zip
- 小学2013年工作总结
- upptime:Ne Neal Daringer的正常运行时间监视和状态页面,由@upptime提供支持
- local-stack-demo-service
- spring图书管理系统.zip
- ProCyclingStats:从ProCyclingStats网站下载车手统计信息
- Kaggle_Otto_Product_Classification:Kaggle Otto Group 产品分类
