点云库驱动的三维重建方法研究
需积分: 0 8 浏览量
更新于2024-07-15
收藏 10.57MB PDF 举报
本文档探讨了使用点云库进行三维重建的方法,主要针对的是Aalborg University Copenhagen的硕士生在 Medialogy(媒体艺术与设计)课程的第二学期项目。研究者们关注点云数据处理和三维重建技术,以便于从多视角的点云数据中生成精确的三维模型。以下是本文的关键知识点概览:
1. **点云库**:研究中涉及的点云库是文章的核心工具,它用于处理和管理原始的点云数据。点云库可能包含多种算法和功能,如数据预处理、数据清洗、噪声过滤以及数据转换,这些都是三维重建的基础。
2. **Autodesk ReCap**:这是一款常见的三维扫描软件,可以用于捕捉和编辑现实世界中的点云数据,可能在项目的初期阶段用于数据采集或作为基准工具。
3. **VisualSFM**:这是一个结构光场和结构从运动(SfM)算法的开源软件,用于通过照片序列重建场景,提供了一种从视觉数据中提取几何信息的方法。
4. **Meshlab**:Meshlab是一个强大的3D数据处理软件,支持点云数据处理,包括表面重建、纹理映射和模型修复,可能是研究者们用来实现点云到网格转换的主要工具。
5. **C3 Technologies** 和 **Drone55**:这两家公司或平台可能提供了无人机或其他设备的数据采集解决方案,用于获取三维重建所需的图像或点云数据。
6. **Octofilms**:这个术语可能指的是一种基于八角形或多边形网格的点云数据处理技术,或者与某种特定的重建算法相关。
7. **Reconstruction projects**:研究者们展示了实际的三维重建项目,通过这些项目验证了所采用方法的有效性和实用性,展示了从理论到实践的转化过程。
8. **Final Problem Statement**:文章的最终部分可能概述了在整个研究过程中发现的问题、改进点以及未来可能的研究方向,可能涉及如何优化重建质量和速度,或处理大规模和复杂场景。
9. **Methods** 部分详细阐述了实施步骤,包括:
- **PointCloud Data**:处理原始点云数据,可能包括数据获取、清理和组织。
- **Structure from Motion (SfM)**:利用相机运动和图像特征来构建场景的三维模型,这是整个重建过程的关键技术。
- **Greedy Triangulation**:一种快速生成三角面片的方法,用于建立初步的网格结构。
- **Grid Projection**:可能是将点云投影到一个格子结构上,以简化处理。
- **Poisson**:可能是用于细化网格的表面重建算法。
- **Delaunay Triangulation**:一种生成不穿孔、不自相交三角形网格的方法,用于提高重建的几何精度。
10. **Implementation** 部分介绍了具体操作步骤,如图像采集、点云数据准备、数据平滑、重建算法的应用等,并强调了质量控制和成功的评估标准。
本文档深入研究了如何利用点云库技术解决三维重建问题,不仅提供了理论背景,还展示了实际应用中的方法和技术细节。对于任何对点云处理和3D建模感兴趣的读者来说,这篇论文提供了宝贵的学习资源和实践经验。

Chapter 3 Investigation
3.2 Autodesk ReCap
Autodesk ReCap is a software that focuses on both capturing point cloud data from a
wide range of images and creating a 3D model using the images from different angles.
There are two different parts of the software, which are used to acquire different actions.
[Autodesk, 2015].
One part of the software is called Autodesk ReCap 360, which is a website allowing
you to upload images of the objects and after a certain waiting time it creates a point
cloud data and a 3D model using this data, if the images were not clear enough or proper
and the software fails to create the data, it notifies the user that the model cannot be
created via email. Figure 3.1 shows what kind of features Recap 360 allows.
Figure 3.1: ReCap 360’s online inter-
face.
Figure 3.2: Example of a point cloud
from ReCap.
The program requires full resolution photos and they need to provide information
of the object from different angels. At least 6 images are required to be added to the
software in order for this to be able to create the 3D model while the maximum amount
of images is 250. Once the images are uploaded and the project has finished being
created, it is possible to export the file of the model as an Obj file to be imported in
Autodesk Maya or 3ds Max, however you can also export them as an .rcs file which can
then be imported in ReCap Pro which then allows the user to increase the accuracy of
the point clouds.
Some of the features that ReCap Pro offers are; photorealistic data visualisation
using the point cloud data, a detailed 3D design and also allows the user to edit and
clean the point cloud data creating a higher accuracy in the representation of the point
cloud. However, the ReCap Pro is mainly aimed at data information gathered from
3D laser scanning and not photography, therefore it is possible to combine the usage of
the two programs ReCap Pro and ReCap 360 to achieve point cloud data and alter it
afterwards using the Pro version. An example of how the program uses the data can be
seen in Figure 3.2.
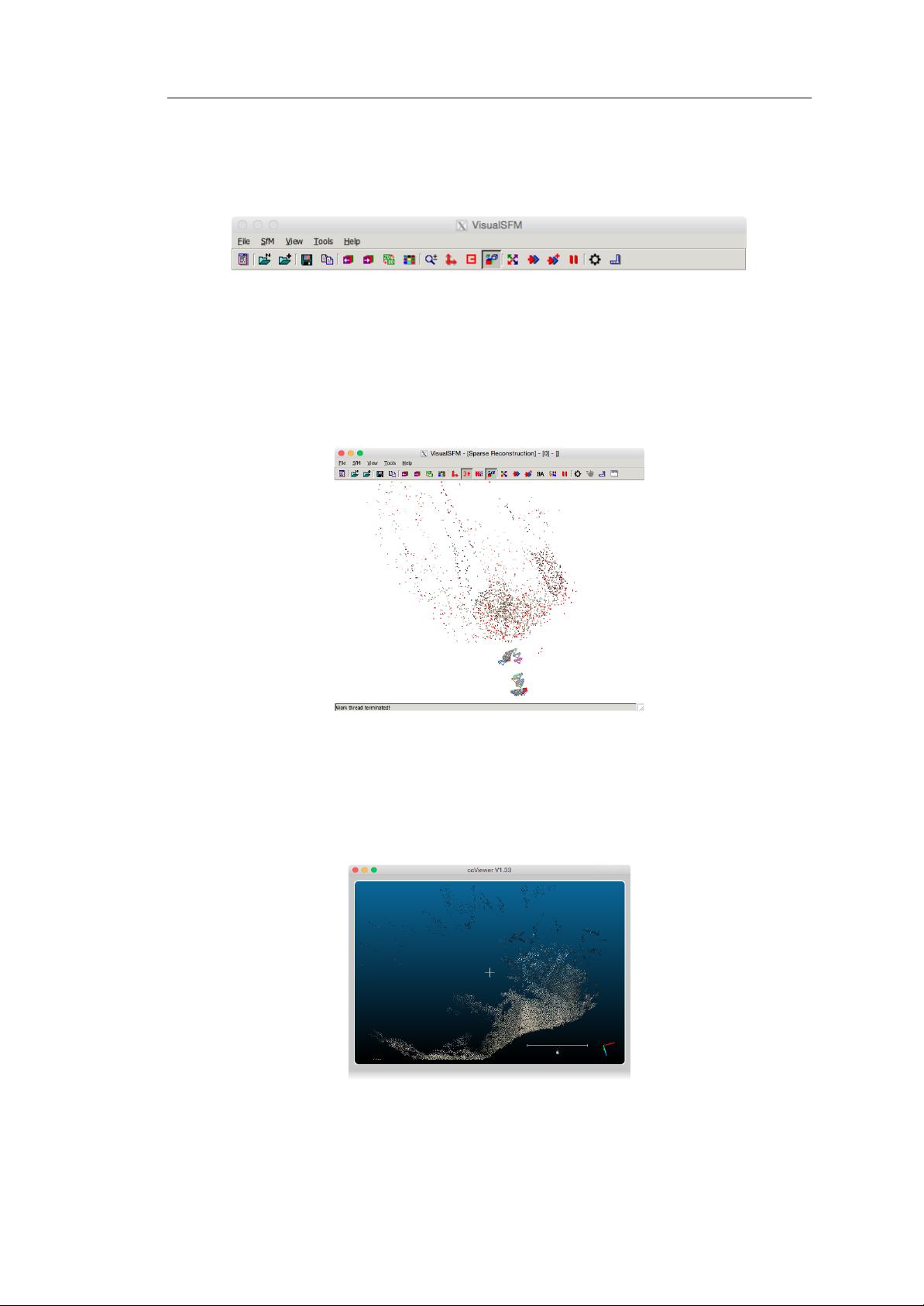
3.3 VisualSFM
VisualSFM is a program that uses Structure from Motion (SfM) to reconstruct 3D
objects using point cloud data. VisualSFM is a combination of multiple tools [Wu,
6 of 64

剩余69页未读,继续阅读
2015-11-24 上传
2022-07-14 上传
2021-06-12 上传
2021-05-21 上传
2020-04-20 上传
2021-07-06 上传
2022-09-20 上传
2022-09-24 上传
2021-08-12 上传

飞天牛牛
- 粉丝: 254
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
