双层控制结构下的远程系统时延补偿策略与仿真优化
196 浏览量
更新于2024-08-31
收藏 732KB PDF 举报
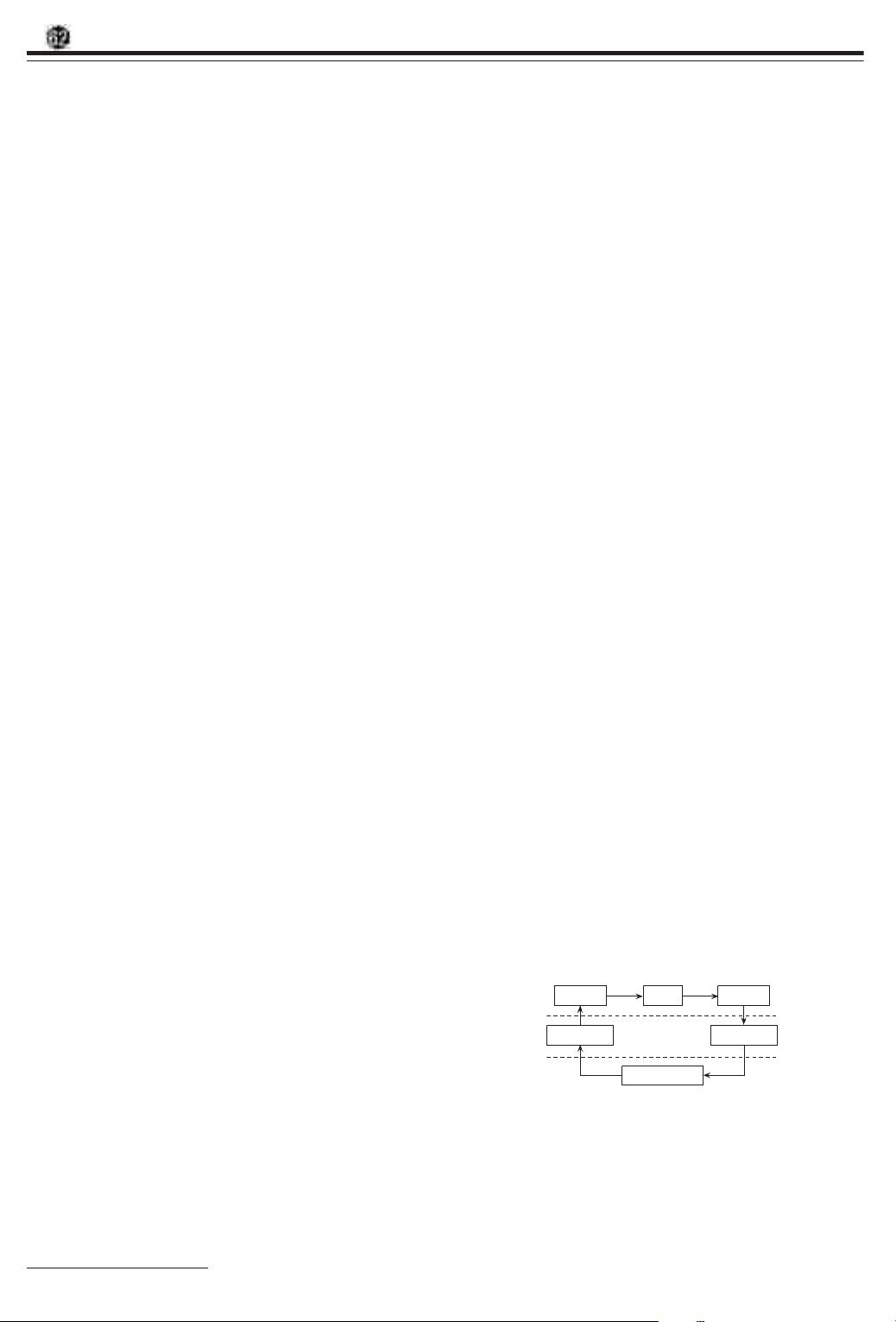
本文主要探讨了远程控制系统时延补偿策略的研究,针对互联网通信中的时延问题,提出了一种创新的解决方案。该方案的核心是构建了一个双层控制系统结构,通过区分控制层次来优化系统性能。底层采用较高的恒定采样频率,以确保控制系统的实时性和稳定性;而高层则使用较低的可变采样频率,以减轻网络负担并减少数据丢失的风险。
针对大时延和数据包丢失问题,文章重点介绍了基于动态矩阵预测控制器设计的前向时延补偿策略和反馈时延补偿策略。动态矩阵预测控制器是一种先进的控制算法,它能够预测未来状态,从而抵消由于网络延迟引起的控制误差。前向时延补偿是预先估计并补偿因网络延迟导致的控制指令到达时间差,而反馈时延补偿则是通过实时监测并调整控制策略,以适应实际执行与预期之间的时间滞后。
通过仿真结果验证,当系统处于随机互联网时延环境中,采用这两种补偿策略能够显著提升控制系统的动态性能。它们能够在保证控制精度的同时,有效降低因网络时延造成的不稳定性和响应延迟。这种策略对于远程控制应用,如工业自动化、远程医疗设备或者自动驾驶等领域具有重要的实际意义。
总结来说,本研究不仅提供了理论基础,还展示了如何通过智能的时延补偿技术来增强远程控制系统的鲁棒性和效率。这对于互联网时代的实时控制任务,特别是那些对反应速度和准确性要求极高的场景,具有重大的工程价值和实践指导意义。
!
!"
#$%&’()*+,-./0123456
789:;(<=
!
" ! #
"
#
>?@A#BC/>DEF
2G;HIJ@A#(KL)*9:<=(MNO
P
!
$ ! %
"
$
Q8RSBGBCT)*9:(UV
#
WX
YZ[\]^_‘ab(RScd
$
ef
!
&
"
g)*
9:+,]h
#
\]8ijkl mn)*opqr
s@A#BC34
#
>tuHv@A#BC %wx
yJ)*9:z%{Y
#
|}8K~) *
L
#
H(KL)*
$
ef
!
’
"
\]
"
Bc(GL
#
cd(P
Hv#$BC(G;G ;
#
8
n(tB22
#
¡PHQ 8¢£¤
BCn
#
¤BCn¥T J)*9:¦§
¨QH©ª«
#
¬‘¢(N
$
ef
!
(
"
®¯:(
)*9:+,?\]8°±BC²³´qµ¶
)*9:(±2
#
·cd(²³ ¸¹M
Nº»J@A#BC(¼E½¾
$
¿H
#
ÀJ@A
#BCÀÁÀB
%
#$ÂÃG;ÄÅSF
#
ÆÇ
¼E½¾@A#BCIÈH(
!
"! ! ""
"
$
ef
!
") ! "*
"
\]8ÉÊËÌÍÎÏÐvÑCÒÓ;
QÔFCÒ
#
gvÑ(BC 9:Ó;QEF2
9:
#
¦ÉÊÕ‘(EF29 :(Ö×cd
Ø Ù) * ´( Ö ×
#
¿ H ¬‘ ^Ú Û r s ¤ B C
%
ÜÝ34
$
Q8ÞÚÛrs@A# BC(UV
#
\
]Þßsà()*+,)*opHIJ@A#(
)*9:Ö×(áâ%w
$
ã[®¯:#$;)*9:+,Iäå
#
æç8
ef
!
&
#
’
#
"#
"
(èà
#
Ö×8Gé
%
êë)*+
,
#
v#$BC%wxyJÈÛìë)*+,{Y
#
íìBCT)*9:±2(UV
$
ÉÊËÌÍ
ÎÏÐvÑîï CÒÓ ;ðÔFCÒ
#
ñT¤B
C
%
Ü Ý3 4
#
IJ ± ò ó ½ ¾ ) * ´
&
+,-
’
ô
õÖ×8aö
%
÷øBC²³opØÙ²³
$
"
9:+,
ùÍ(#$ ;)*9:+, úû
"
üý
#
ÀJ
@A#(þÿh!
#
g¯"´ #)*´(¯$¦/
g)*´#%Ù´(¯$#$&Ê@A#
$
ÀJ
#$’(()*¦ /¯$ Ñ*(UV
#
#$)* 9
:|}Û
*®ï+ BC
%
n,Ü- /_, ¯
$Ä34
#
.34 /01 2z%) *9: 2’
í
#
34-5
$
6>H ½¾(@A#B C12
O ¦78z%9 Á( :é34
#
ú:é
;
#
ÀJï+CÒ
#
)*´/B<=§)T>(
÷øï
?
#
v@AUVKL)*9:(±2
(
B
:éC
#
vDdEF )*9:(5F2
$
#
µØ#$;)*9:(+,
#
Ê‘¸()*c
dGH@A#BC(UVvHµ¶KL)*9:
±2(‘¸b
I
$
Jef
!
&
"
\](ijmn)*9:+,
#
È
Û)*Ê8z% 9Á
#
KLKL MNî@A#
KLÈÛ)*9:
#
*®KL)*÷ø9Á
#
@A#BC%wxyJÈÛ)*9:z%{Y
$
O
P
#
@A#BC vT)*9:( ±2 ¬‘Q R
UV
#
¿HST Hå( KL) *
$
ñT
U34
#
Vß8KL)*÷ø9Á
#
!WKL)*´
#
! " # $ % & ’ ( ) * + , - .
!"#
!
$%&’() *+,-./0(1
"
2% 34
#*!)!$
#
!"
!
56789:;<=>1?@ABCD
"
EF6GHIGJKLMNOPQR1?ST
$
U
PVWQRSTGHXYNZ[GJ\K]^_QR1?N‘[@
%
aYPNbWQRSTGH
6XUNcIGJ\K]de;fghijklmno
$
56pqrstu<=ilmvn oN
wx
"
yzOPQRST{H|}~QR*6<=i<=
$
S
,9:;<=NWGH
&
<=ArQR1?N|}
@A
$
#$%
!
QR1?
%
9:;
%
<=
%
|}~QR
%
&’()*
!
./ *(*0!’
+,-./
!
1
+01*
!
#$$% & %$’(
"
))$&
#
!’ & $$%)& $#
2345
!
*))% + !’ & )’
%
674 5
!
*$$& & !" & )(
89:;
!
$0¡¢£
!
2)!!$"(!!"
’
! " # $ % & ’
,-./012/ 345.1 670489024: ,;72<8.:0
=4->*& ?4@’
1340*$$&
<
*&
=<
’
5
*$$&
>
’
?
%Ù´ L ¯"´
aöBC ÷øBCîï#$
K~)*´
’
"
@ABCDEF
5640" 789:;<=8> ?;@9<;A BCB98D
下载后可阅读完整内容,剩余3页未读,立即下载
2021-10-11 上传
2021-10-10 上传
2024-04-24 上传
2023-08-26 上传
2023-05-30 上传
2023-06-08 上传
2023-04-12 上传
2023-09-15 上传
2023-05-25 上传

weixin_38663526
- 粉丝: 3
- 资源: 940
 我的内容管理
展开
我的内容管理
展开







最新资源
- 明日知道社区问答系统设计与实现-SSM框架java源码分享
- Unity3D粒子特效包:闪电效果体验报告
- Windows64位Python3.7安装Twisted库指南
- HTMLJS应用程序:多词典阿拉伯语词根检索
- 光纤通信课后习题答案解析及文件资源
- swdogen: 自动扫描源码生成 Swagger 文档的工具
- GD32F10系列芯片Keil IDE下载算法配置指南
- C++实现Emscripten版本的3D俄罗斯方块游戏
- 期末复习必备:全面数据结构课件资料
- WordPress媒体占位符插件:优化开发中的图像占位体验
- 完整扑克牌资源集-55张图片压缩包下载
- 开发轻量级时事通讯活动管理RESTful应用程序
- 长城特固618对讲机写频软件使用指南
- Memry粤语学习工具:开源应用助力记忆提升
- JMC 8.0.0版本发布,支持JDK 1.8及64位系统
- Python看图猜成语游戏源码发布
