三自由度直角坐标工业机器人设计与分析
版权申诉
50 浏览量
更新于2024-06-23
收藏 671KB DOC 举报
"三自由度平面坐标机器人设计"
在工业生产中,自动控制系统是不可或缺的一部分,它们广泛应用于诸如自动化机床控制、计算机系统以及机器人技术等领域。其中,机器人作为相对较新的技术,正在逐步改变现代工业的格局。本文重点探讨的是一款三自由度直角坐标型工业机器人,这种机器人能在三个直线方向上进行工作,主要任务是在控制器的指挥下,完成物体从一处到另一处的搬运。
关键词:三自由度、直角坐标、工业机器人
首先,前言部分简要介绍了机器人在当前工业环境中的重要地位。接着,文章深入讨论了机器人的基本概念。在1.1章节,对机器人进行了定义和概述,强调其在自动化领域的关键作用。1.2章节回顾了机器人的历史发展,从最初的设想直到现代技术的成熟,展示了机器人技术的演进过程。1.3章节则展望了机器人技术的未来趋势,包括智能化、灵活性和多功能性的发展方向。
进入2.总体设计环节,文章详细阐述了机器人的构成及其各部分之间的相互关系。在2.1章节,分析了机器人的主要组成部分,如执行机构、控制系统、传感器等,并解释了这些组件如何协同工作。2.2章节提出了整体设计方案,这通常涉及到机器人运动学和动力学的建模。2.3章节探讨了驱动方式的选择,包括电动、液压或气动等不同驱动形式的优缺点及其适用场景。
接下来的3章详细介绍了机械系统的设计。3.1章节聚焦于机械手的结构设计,这部分涵盖了机械手的抓取装置、关节结构以及手腕的灵活性设计,确保机器人能够稳定地抓取和移动工件。3.2章节详细论述了传动丝杆的设计,这是实现直线运动的关键部件,通过螺纹传动将旋转运动转化为直线运动,保证了定位精度和运动的平稳性。3.3章节则关注导轨的设计,导轨作为支撑和导向机构,确保机器人在三个自由度上的顺畅移动和定位。
本文全面地介绍了三自由度直角坐标工业机器人的设计过程,从理论基础到实际应用,涵盖了机器人的历史、发展趋势、总体设计以及关键的机械系统设计。这样的设计不仅提高了工作效率,也为未来更复杂、更高精度的工业机器人提供了参考。
人的本体部分都采用这种机构形式的机器人。
要机器人像人一样拿取东西,最简单的基本条件是要有一套类似于指、腕、
臂、关节等部分组成的抓取和移动机构——执行机构;像肌肉那样使手臂运动的
驱动-传动系统;像大脑那样指挥手动作的控制系统。这些系统的性能就决定了
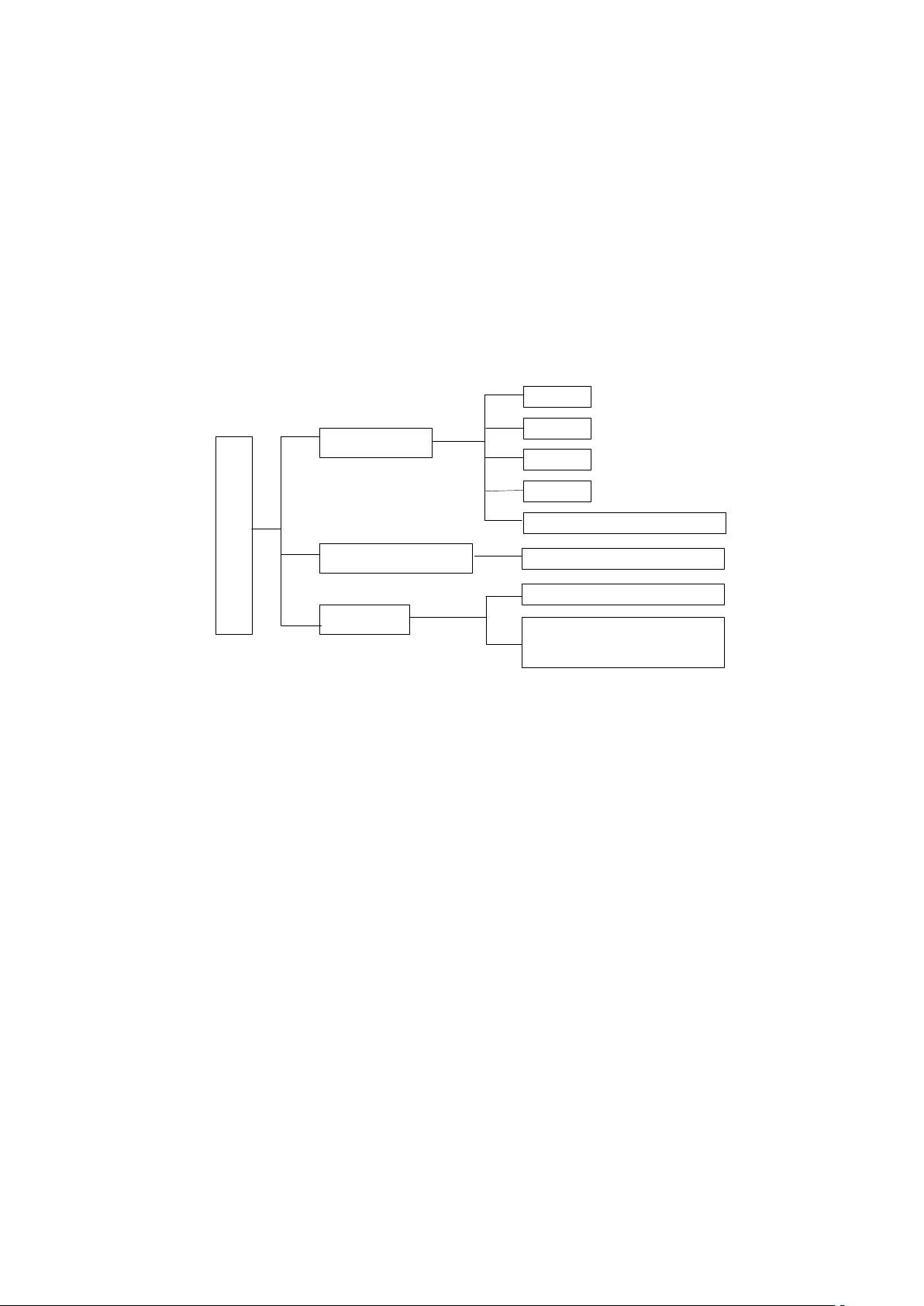
机器人的性能。一般而言,机器人通常就是由执行机构、驱动-传动系统和控制
系统这三部分组成,如图 1-1 所示。
执行机构
机
器
人
控制系统
驱动-传动系统
手部
腕部
臂部
腰部
基座部(固定或移动)
电、液或气驱动装置
单关节伺服控制器
关节协调及其它信息交换
计算机
图 1-1 机器人的一般组成
机器人的机械系统主要由执行机构和驱动-传动系统组成。执行机构是机
器人赖以完成工作任务的实体,通常由连杆和关节组成,由驱动-传动系统提供
动力,按控制系统的要求完成工作任务。驱动-传动系统主要包括驱动机构和传
动系统。驱动机构提供机器人各关节所需要的动力,传动系统则将驱动力转换为
满足机器人各关节力矩和运动所要求的驱动力或力矩。有的文献则把机器人分为
机械系统、驱动系统和控 制 系 统 三 大 部 分 。 其 中 的 机 械 系 统 又 称 操 作 机
(Manipulator),相当于本文中的执行机构部分。
剩余29页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-07-15 上传
2023-07-11 上传
2023-07-02 上传
2023-07-15 上传
2023-07-11 上传
2023-07-12 上传

omyligaga
- 粉丝: 97
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







