伺服驱动器CanOpen通讯指南:从入门到精通
"伺服CanOpen使用手册,学习DS402很好的资料,涵盖伺服驱动器的接线、连接、CANopen通讯、单位换算、位置控制、设备控制、控制模式等多个方面,适用于多个伺服厂家的参考。"
这篇文档详细介绍了伺服驱动器与CANopen通信协议的集成使用,适合于对伺服系统和CANopen通讯感兴趣的工程师或技术人员。CANopen是一种基于CAN(Controller Area Network)的高层通信协议,广泛应用于工业自动化领域。
1. **概述**:文档首先简要介绍CANopen相关的标准文档、术语和缩写,并对CANopen协议进行了概述,帮助读者理解基础概念。
2. **接线和连接**:这部分详细说明了伺服驱动器的物理连接,包括电源、信号线和CAN总线的接线方法,确保设备正确接入网络。
3. **CANopen通讯**:详细介绍了CAN标识符分配、服务数据对象(SDO)和过程数据对象(PDO)的使用,以及SYNC报文、HEARTBEAT报文和网络管理(NMT)的功能。这些内容是理解CANopen网络通信的关键。
- **SDO** 是用于传输配置和诊断数据的双向通信服务。
- **PDO** 则用于快速传输实时数据,如位置、速度和扭矩等。
- **SYNC** 和 **HEARTBEAT** 报文用于同步网络设备和监控设备状态。
- **NMT** 网络管理服务则负责网络的启动、停止和状态监控。
4. **单位换算单元(FactorGroup)**:这部分阐述了如何将物理量如位置、速度和加速度转换为数字信号,便于在CANopen网络中传输。
5. **位置控制功能**:详细列举了与位置控制相关的参数,包括设定点、位置误差、速度限制等,这些都是在位置控制模式下实现精确运动控制的重要参数。
6. **设备控制**:描述了伺服驱动器的控制状态机,包括不同控制字和状态字的意义,以及各种操作选项代码,如禁用操作、快速停止、故障反应等,用于控制设备的运行状态。
7. **控制模式**:涵盖了速度控制模式和位置控制模式,以及回零模式的详细信息。每个模式都包括了对应的控制字、状态字和相关参数,指导用户如何根据需求切换和设置控制模式。
- **回零模式(HOMINGMODE)** 详述了如何通过伺服驱动器进行自动寻零,包括控制字、状态字和参数设置。
- **速度控制模式(PROFILEVELOCITYMODE)** 和 **位置控制模式(PROFILEPOSITIONMODE)** 介绍了如何进行速度和位置的精确控制,包括控制字、状态字和相关参数,以及功能描述。
8. **对象字典表**:作为附录,对象字典包含了所有可用的参数和变量,是配置和调试CANopen设备的重要工具。
这份伺服CanOpen使用手册提供了全面的指导,对于理解和应用CANopen协议在伺服驱动中的实际操作具有极高的价值。无论是设备的初始配置、故障排查还是性能优化,都能从中找到相应的信息。
11
3.3 过程数据对象 PDO
PDO 用来传输实时数据, 数据从一个生产者传到一个或多个消费者。数据传送限制在 1 到 8 个字节。
PDO 通讯没有协议约束(意味着数据内容已预先定义),因此消费者可以在很短的时间内处理完接受到的
数据。PDO 数据内容只由它的 CAN ID 定义,假定生产者和消费者知道这个 PDO 的数据内容。
每个 PDO 在对象字典中用 2 个对象描述:
� PDO 通讯参数:包含将被 PDO 使用的 COB-ID,传输类型,禁止时间和定时器周期。
� PDO 映射参数:包含一个对象字典中对象的列表,这些对象映射到 PDO 里,包括它们的数据长度(in
bits)。生产者和消费者必须知道这个映射,以解释 PDO 内容。
PDO 消息的内容是预定义的(或者在网络启动时配置的),映射应用对象到 PDO 中是在设备对象字
典中描述的。如果设备(生产者和消费者)支持动态,那么使用 SDO 报文可以配置 PDO 映射参数,本驱
动器支持动态 PDO 映射。PDO 映射的必须遵守以下 2 个规则:
1、 每个 PDO 最多可映射 4 个对象;
2、 每个 PDO 的长度必须不超过 64 位。
PDO 映射流程:
1、 设置 PDO 对应映射参数(1600
h
或 1601
h
或 1A00
h
或 1A01
h
)子索引 0 的内容为 0;
2、 修改 PDO 对应映射参数(1600
h
或 1601
h
或 1A00
h
或 1A01
h
)子索引 1~4 的内容,映射
数据;
3、 设置 PDO 对应映射参数(1600
h
或 1601
h
或 1A00
h
或 1A01
h
)子索引 0 的内容为合法的
数字(该 PDO 映射的对象数)。
4、 PDO 映射完成。
PDO 可以有多种传送方式:
� 同步(通过接收 SYNC 对象实现同步)
周期:传送在每 1 到 240 个 SYNC 消息后触发
� 异步
由设备子协议中规定的对象特定事件触发传送。
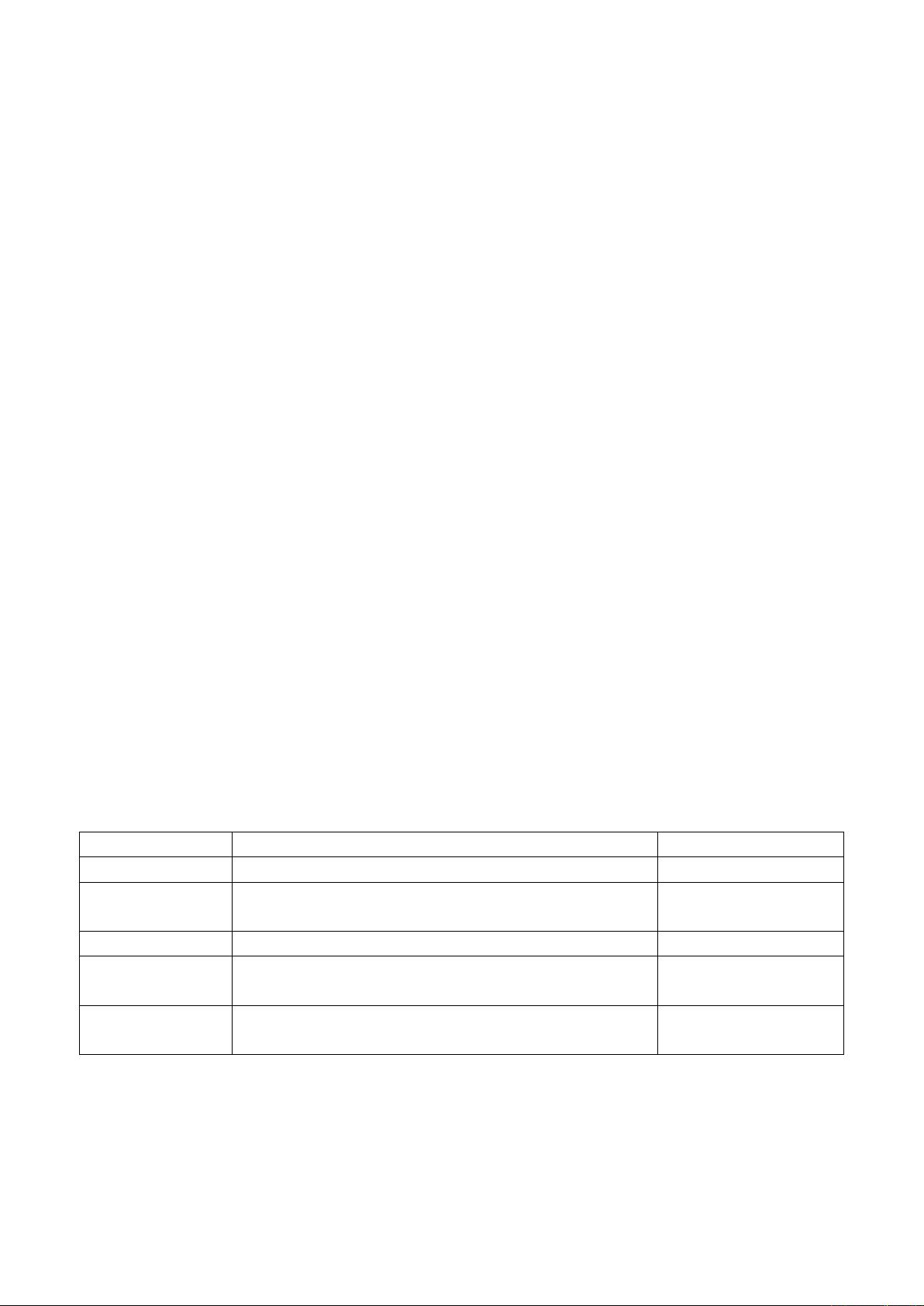
PDO 传输类型定义表
传输类型值
描述
PDO
0
保留
—
1~240
SYNC 方式:
该值代表两个 PDO 之间的 SYNC 对象的数目
TPDO/RPDO
240~253
保留
—
254
异步方式:
如果 PDO 内容发生变化,触发该 PDO 发送
TPDO
255
异步方式:
PDO 内容周期性更新和发送
TPDO/RPDO
一个 PDO 可以指定一个禁止时间,即定义两个连续 PDO 传输的最小间隔时间,避免由于高优先级信
息的数据量太大,始终占据总线,而使其它优先级较低的数据无力竞争总线的问题。禁止时间由 16 位无
符号整数定义,单位 100us。
一个 PDO 可以指定一个事件定时周期,当超过定时时间后,一个 PDO 传输可以被触发(不需要触发
位)。事件定时周期由 16 位无符号整数定义,单位 1ms。
剩余64页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

u010655348
- 粉丝: 128
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#实现桌面飘雪效果,兼容Win7及XP系统
- Swift扩展实现UIView视差滚动效果教程
- SQLServer 2008/2005版驱动sqljdbc4.jar下载
- 图像化操作的apk反编译小工具介绍
- 掌握IP定位技术,轻松获取城市信息
- JavaFX项目计划应用PlanAmity代码库介绍
- 新华龙C8051系列芯片初始化配置教程
- readis:轻松从多Redis服务器获取数据的PHP轻量级Web前端
- VC++开发的多功能计算器教程
- Android自定义图表的Swift开发示例解析
- 龙门物流管理系统:Java实现的多技术项目源码下载
- sql2008与sql2005的高效卸载解决方案
- Spring Boot微服务架构与配置管理实战指南
- Cocos2d-x跑酷项目资源快速导入指南
- Java程序设计教程精品课件分享
- Axure元件库69套:全平台原型设计必备工具集
