基于DSP的多轴运动控制器设计与实现
146 浏览量
更新于2024-09-01
收藏 281KB PDF 举报
"本文介绍了一种基于DSP(数字信号处理器)的多轴运动控制器的设计与实现,使用了TMS320F206 DSP芯片,具备高集成度、快速运算和强大处理能力的特点。控制器通过PC/104总线与主控机通信,满足了实时数据交换、高稳定性和低功耗的需求。设计中,控制器需要具备多路控制能力,采样速率接近100ksps。"
文章详细阐述了现代控制技术背景下,多轴运动控制器的重要性。为了满足高速、高精度控制需求,设计了一种基于DSP的控制器,该控制器由主控机、控制器和控制实体三部分构成,其中DSP芯片因其高速处理能力和高精度而被选为核心。TMS320F206 DSP芯片拥有32KB的片内闪存,能够存储执行程序,减少对外部存储器的依赖,降低成本并降低功耗。
控制器设计遵循了PC/104总线标准,这种总线结构允许多级外围设备的栈连,提高了设备集成度,降低了体积和重量,并提供了更好的稳定性。控制器需具备与主控机进行实时数据交互的能力,确保控制过程中的数据新鲜性。此外,控制器还应具有高集成度,稳定的采样性能以及低功耗特性,以实现多路控制并达到约100ksps的采样速率。
控制器的工作原理是,采集到的数据立即送入公共存储器,主控机读取这些数据进行处理,然后将处理结果返回给控制器,完成一个完整的控制循环。这种设计确保了控制的实时性和准确性,适用于各种数控设备和机器人控制系统。
基于DSP的多轴运动控制器通过优化硬件设计和选择高性能的DSP芯片,实现了高效、稳定的控制效果,广泛应用于工业控制领域。其紧凑的PC/104总线结构和高集成度设计,使得控制器在满足功能需求的同时,也兼顾了成本和能耗的平衡。
一种基于一种基于DSP的多轴运动控制器的设计与实现的多轴运动控制器的设计与实现
绍一种基于DSP的多轴运行控制器的设计方案,包括控制器的各部分组成及功能,并给出相应的示意图。此种控制
器设计个有集成度高、运算速度快、处理能力强等特点。
引言
现代化控制日新月异的今天,各类高速、高精度的控制设备得到了广泛的运用。作为一种实时补偿的控制方法,其相应的硬件设
备要求在保持控制实时性的基础上,更要具有与主控机进行实时数据交流的能力。此类设备在很多数控设备、机器人控制等方
面都有广泛的运用。另一方面,DSP是现在比较热门的技术,其芯片处理速度可以达到几十ns、几ns,甚至更高,处理精度为32位
或更高,所以以其作主控芯片,在硬件设计上可实现具有高速、高精度的控制器。
一般具备实时数据补偿能力的控制设备由三部分组成:主控机、控制器、控制实体。控制器(处理器)和主控机相互独立,控
制卡通过总线与主控机相连,利用电缆对各采样点的控制信息进行采样,再与控机上存储的预定数据进行某种算法的处理之后,反
馈到各控制点,从而实现“离线规划,实时补偿”的控制过程。再则,对于任何一种控制器,希望它的性能稳定,控制精度高,而且功耗
低。我们设计的控制器也正是基于此种考虑的,且在各类工业级小板机上得到广泛的运用。它通过PC/104总线,栈连多级的外围
设备。PC/104总线是一种在业控制方面运用广泛的工业标准总线结构,它独特的栈连扩展设备的结构设计,使得控制设备的集成
度提高,体积更小,质量更轻,而且比插卡型稳定性能更好。
在设计中,控制器必须达到以下标准:
(1)采用PC/104总线标准;
(2)具备与主控机进行实时数据交换的能力;
(3)集成度高,采样性能稳定,并且低功耗;
(4)单板具备多路控制能力;
(5)采样速率近似达到100ksps。
在综合考虑的基础上,我们选用TMS320F206(以下简称F206)芯片。它有32KB的片内闪速存储器,可以存储可执行程序,从而,
在不需要外扩存储器的基础上,就能满足控制运算所需存储空间,而且,片内存储器与外部存储器相比,有几个特点:具有比外部存
储器更高的性能、更低的成本价格和更低的功耗。
控制器设计原理
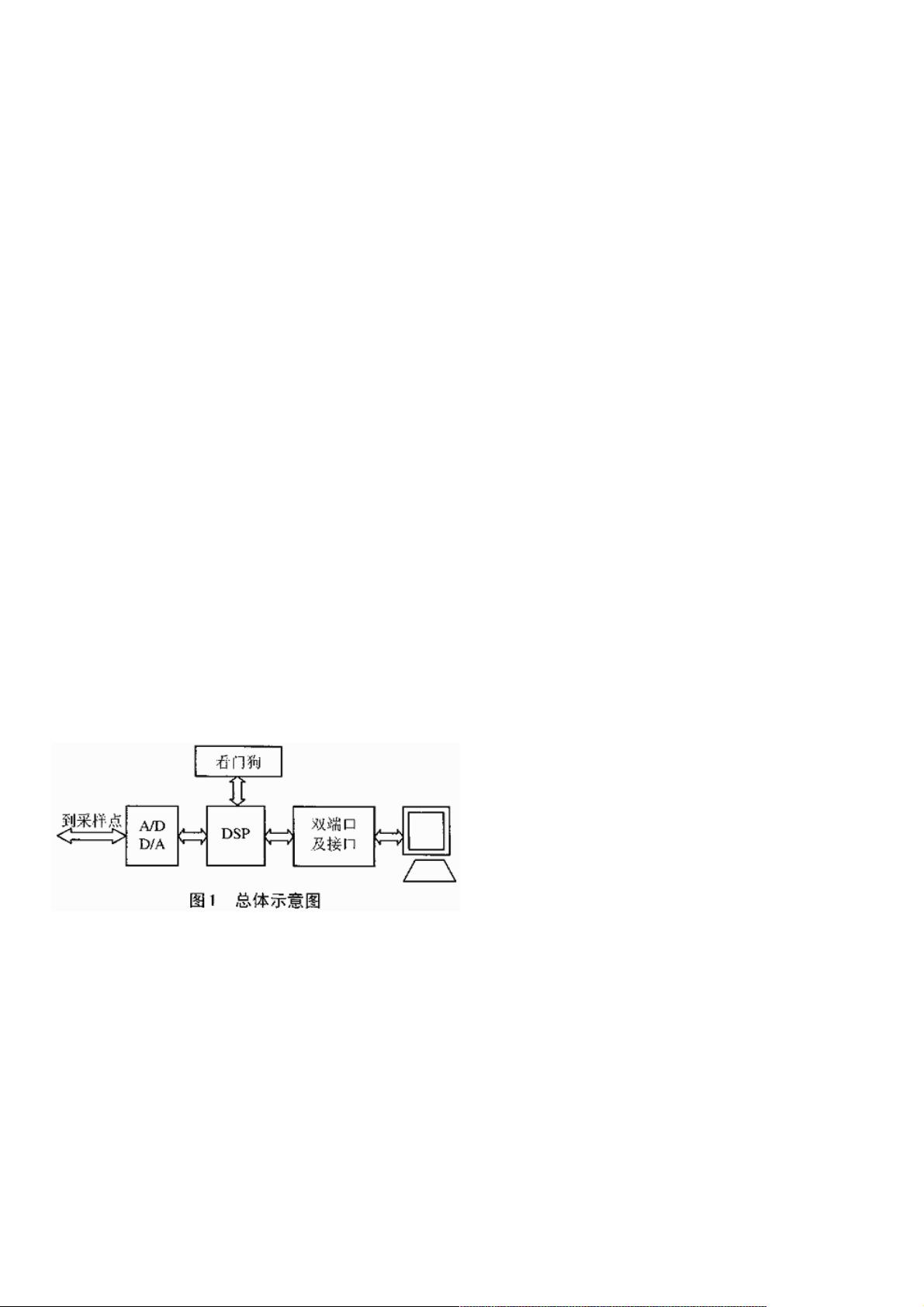
作为一种具备实时数据补偿的控制器,要求采集的数据在第一时间内提交给公用存储器。主控机进行读取,并进行相应处理。处
理好的数据反馈给控制器,从而完成一个控制过程。总体示意如图1所示。
1.A/D、D/A转换单元
对于A/D转换单元,我们采用MAX197作为模/数转换器件,如图2所示。针对MAX197的特点,作了以下的设计。
下载后可阅读完整内容,剩余5页未读,立即下载
2008-12-11 上传
2009-01-01 上传
2020-08-07 上传
2020-12-09 上传
2012-02-24 上传
2020-07-20 上传
2021-08-14 上传
2020-10-17 上传
2013-07-11 上传

weixin_38657835
- 粉丝: 3
- 资源: 931
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
