双尺度图Transformer:智能导航的探索与规划
148 浏览量
更新于2024-06-20
收藏 1.18MB PDF 举报
拓扑地图与全局行动规划是自主导航和人工智能领域的重要研究议题,它涉及智能体在未知环境中执行任务时如何结合语言指令和环境理解。本文的核心内容集中在构建一个名为DUET(双尺度图Transformer)的模型,该模型旨在解决智能体在视觉和语言导航(VLN)任务中的挑战。DUET的关键在于它采用了双重编码策略,包括粗尺度编码和细尺度编码。
首先,粗尺度编码(如全局行动规划)是在拓扑地图上进行的,它关注的是整体环境结构和可导航区域。智能体通过预测全局动作,即地图中所有可到达的节点,来规划长远的探索路径。这种全局视角有助于指导实体有效地在复杂的行动空间中探索,但同时也带来了推理复杂性的问题。
另一方面,细尺度编码则聚焦于局部观测,即通过当前节点的感知信息来理解和响应具体的语言指令。这要求模型具备跨模态理解能力,能够整合视觉和语言信息,确保在执行指令时的精确性。
DUET通过动态融合这两种编码方式,解决了全局推理与细粒度理解之间的平衡。它并非单纯依赖于单一的全局或局部策略,而是根据当前状态灵活调整,以适应不同的导航任务。在实验中,DUET显示出显著优于其他先进方法,如REVERIE和SOON,尤其是在处理目标导向的视觉和语言导航基准测试,如R2R上,显示了其在实际场景中的优越性能。
这项工作的重要性在于它不仅推进了自主导航技术的发展,还展示了如何将语言理解和环境探索相结合,以提高智能体在复杂环境中的导航能力。这种双尺度图Transformer模型的设计思路和实证结果,为未来的AI研究提供了有价值的方向。
2
16539
→
一
O
∈
N
R
A
N
N
i
=1
E
V
G G
i
=1
G
{V E
}
i
=1
i
=1
W
{}
R {}
O
{}
E
E.T. [16]和HAMT [15]直接使用转换器来捕获对所有过
去观测和动作的长期依赖性(见图2中的第一行)。
导航地图。视觉导航的工作有着悠久的传统,使用
SLAM [31]来构建环境的度量地图[32],使用非参数方
法 [33] , 神 经 网 络 [34 , 35] 或 两 者 的 混 合 [36] 。
Anderson等人[37]将这种度量映射用于VLN任务。然
而,实时导航中度量地图的构建是一个挑战,需要精
确的确定。因此,一些作品[38,39]建议将地图表示
为拓扑结构,用于预先探索环境[40],或用于回溯到
其他位置,权衡导航精度与路径长度[10,24]。最近
的一些VLN作品[8,19,20]使用拓扑图来支持全局行
动规划,但它们使用递归架构进行状态跟踪,并且还
缺乏用于语言基础的精细尺度表示,如图2所示。我们
通过一个具有拓扑图的双尺度图Transformer来解决上
述限制。
序列预测的训练算法。行为克隆是序列预测中应用最
广泛的训练算法。然而,它受到训练和测试之间的分
布变化的影响。为了解决这一限制,已经提出了不同
的训练算法,例如预定采样[41],Dagger [42],强化学
习(RL)[43]。大多数VLN作品[13,14]结合了行为
克隆和A3C RL [44]。Wang等人[45]建议通过软专家蒸
馏来学习奖励。由于在奖励稀疏的任务中使用RL的困
难,我们转而使用交互式演示器来模仿专家并在顺序
训练中提供监督。
3.
方法
问题表述。
在离散环境的标准
VLN
设置
[2
,
7
,
8]
中,环境是一个不规则图
G
=
{V
,
E}
,其中
V
={
Vi
}
K
表
示
B
行动
D
e
B
C
C
一
D
F
一
F
D
e
D
e
e
“
t
“
1
G
新观察
“
t
G
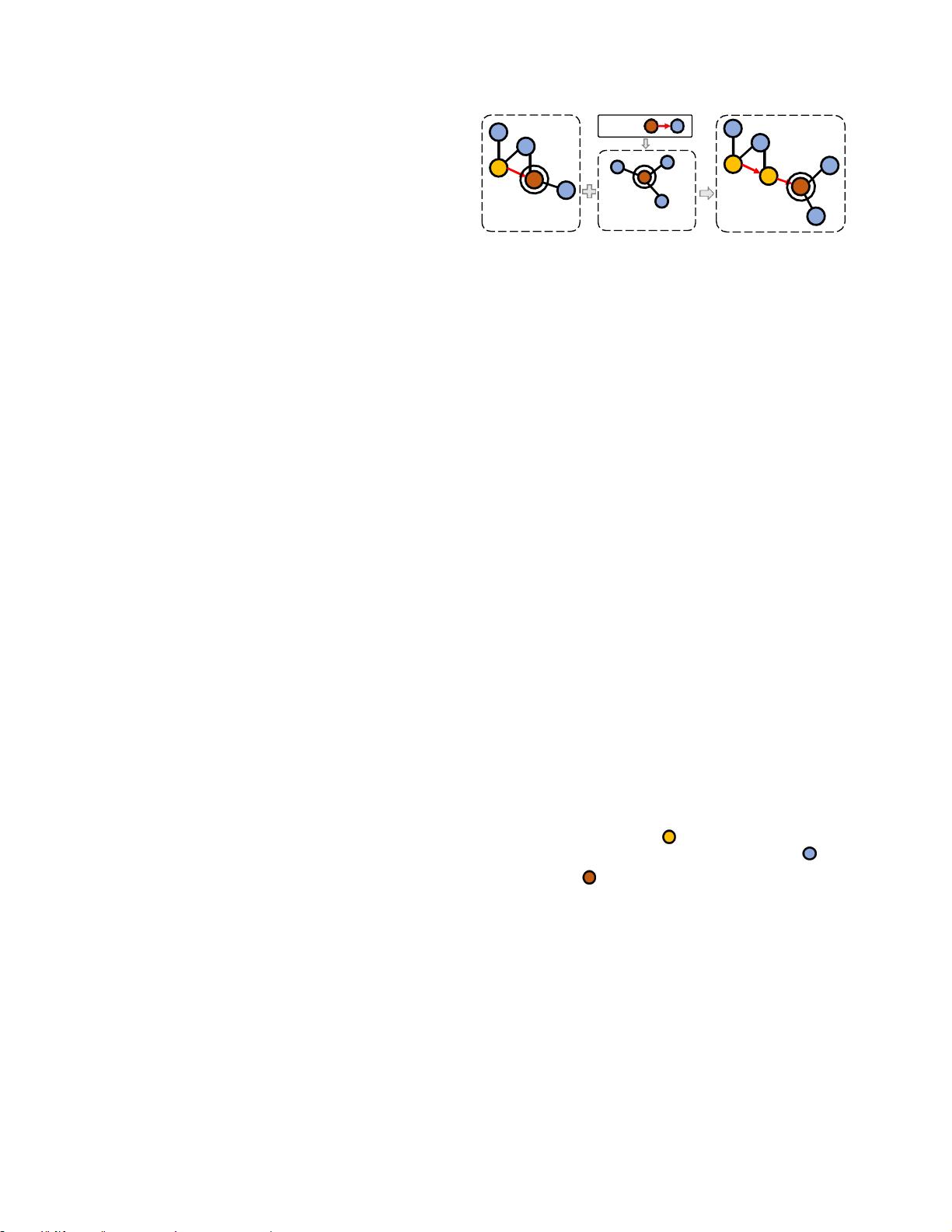
图3.图在时间步长t处更新的图示。给定一个新的动作d e,
代理在节点e处接收新的观测。然后添加新节点并更新节点
表示。
与其相邻节点(
V
t
)以及它们的坐标相对应的可变
视图(
V
t
)的可导航视图是
t
的子集。步骤
t
处的可能
局部动作空间
t
包含导航到
Vi
(
Vt
)并在
Vt
处
停止。在
智能体决定停在一个位置之后,它需要预测目标对
象在全景中的位置
探索能力和语言基础能力是虚拟语言智能体的两
项 然而,现有的作品要么只
允许局部动作
t
[13-15 ]
,这阻碍了长期动作规划,要
么缺乏对象表示
t [ 8
,
19
,
20 ]
,这可能不足以进行
细粒度的我们的工作解决了这两个问题的双重
-
规模代表性和全球行动规划。
概况. 如图1所示,我们的模型由两个可学习的模块组
成,即拓扑映射和全局行动规划。拓扑映射模块随时
间逐渐构建拓扑图。然后,全局动作规划模块基于粗
尺度全局观测和细尺度局部观测执行双尺度推理。在
下文中, 我们将在 Sec.3.1和第 二节中的 全球行动 计
划。3.2. 在本节结束时,我们将介绍我们训练模型的
方法,并将其用于第二节的推理。三点三
3.1.
拓扑映射
环境图G最初是未知的。
K
个
可导航节点,以及 表示连接边。一个
智能体配备了RGB摄像头和GPS传感器,并在以前看
不见的环境中的起始节点处初始化。代理的目标是解
释自然语言指令,并遍历图到目标位置,找到指令指
定的对象
=
w
i
L
是具有
L
个字的指令的字嵌入。 在每个时间
步
t
,代理接收其当前节点
Vt
的全景
视图和位置坐
标。全景被分割成n个图像
t
=
ri
n
,每个图像由图像
特征向量
ri
和唯一取向
表示。 为了实现细粒度的视
觉感知,
使用注释的
对象边界框或自动对象检测
器在
全景中提取
m
个对象特征
t=oim [46]
。此外,代理商还
知道一些导航
-
代理,因此,我们的模型逐渐建立自己的地图我们-
设
t
=
t
,
t
,
其中
Kt
个
节点,
t
是在
t
个导航步骤之后观察
到的环境的地图。
t
中有三种类型的节点(参见图
1
):(
i
)访问过的节点
;
(
ii
)可导航的节点
;
以
及
(iii)当前节点。 代理可以访问已访问节点和当前节点
的全景视图。可导航节点是未探索的,并且仅从已访
问的位置部分观察到,因此,它们具有不同的视觉表
示。 在每一步t,我们将当前节点V
t
及其相邻的未访问节点N(
V
t
)到V
t
-1
,并相应地更
新
t
-1
,如图
3
所示。鉴于
在V
t
处的新观察,我们还如下更新当前节点和可导航
节点的视觉
节点的可视表示 在时间步t,代理
剩余14页未读,继续阅读
2019-08-14 上传
2021-05-06 上传
2021-01-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

cpongm
- 粉丝: 5
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
