水箱水位模糊控制系统MATLAB实现与仿真
190 浏览量
更新于2024-01-05
5
收藏 2.93MB DOC 举报
智能控制及MATLAB实现-水箱液位模糊控制仿真设计(完整版)资料介绍了一种水箱水位模糊控制系统的设计方法,并借助MATLAB软件进行了实现和仿真。该设计可以通过模糊逻辑工具箱建立一个基于模糊推理系统的控制模型,以实现对水箱液位的精确控制。
在MATLAB中,通过输入sltank命令可以打开模型窗口,显示了水箱液位的仿真图。然后,通过输入fuzzy命令,可以打开模糊逻辑工具箱的图形用户界面窗口,创建一个Mamdani模糊推理系统。该系统由两个输入变量和一个输出变量组成,分别为水位误差、误差变化和阀门开关速度。
为了设计模糊化模块,首先需要定义水位误差和误差变化的论域范围。在本设计中,水位误差的论域范围为[2.95, 3.05],而误差变化的论域范围为[-0.2, 0.2]。而且,在该模糊化模块中,水位误差被划分为7个模糊集,包括NB、NM、NS、ZE、PS、PM、PB;同时,误差变化也被划分为5个模糊集。图3中给出了输入变量的划分情况。
对于每个模糊集,都可以设置其隶属度函数,本设计中,所有模糊集的隶属度函数均为高斯函数。根据给定的参数[0.01 2.95]、[0.01 2.97],[0.01 2.99]、[0.01 3]、[0.01 3.01]、[0.01 3.03]、[0.01 3.05],可以得到每个模糊集的隶属度函数。
在模糊推理系统中,通过设定一组模糊规则,可以将输入变量的模糊值映射到输出变量的模糊值。本设计中,给出了一些模糊规则的示例,来说明如何进行模糊推理。根据这些规则,可以得到输出变量阀门开关速度的模糊集。
最后,通过将输入变量的模糊值和模糊规则结合,可以得到输出变量的具体值。该设计中,通过设定模糊集合的中心(也称为模糊中心)来确定输出变量的模糊值。根据模糊集合中心的不同选择,可以得到不同的输出变量值,在MATLAB中,可以使用defuzz命令来进行模糊化处理。
综上所述,通过智能控制及MATLAB实现-水箱液位模糊控制仿真设计(完整版)资料,我们可以了解到如何使用MATLAB软件进行水箱水位模糊控制系统的设计和仿真。该设计方法可以通过模糊逻辑工具箱创建一个Mamdani模糊推理系统,并通过定义模糊化模块、设置隶属度函数、设计模糊规则等步骤来实现对水箱液位的精确控制。

第二章
根据设计要求我们对控制参数以及控制算法进行分析,并对所需硬件进行选型,使液位控
制达到最佳的效果。
第三章
针对单容水箱液位控制系统,对其在组态王中的开发进行介绍,开发了系统总体监控系统
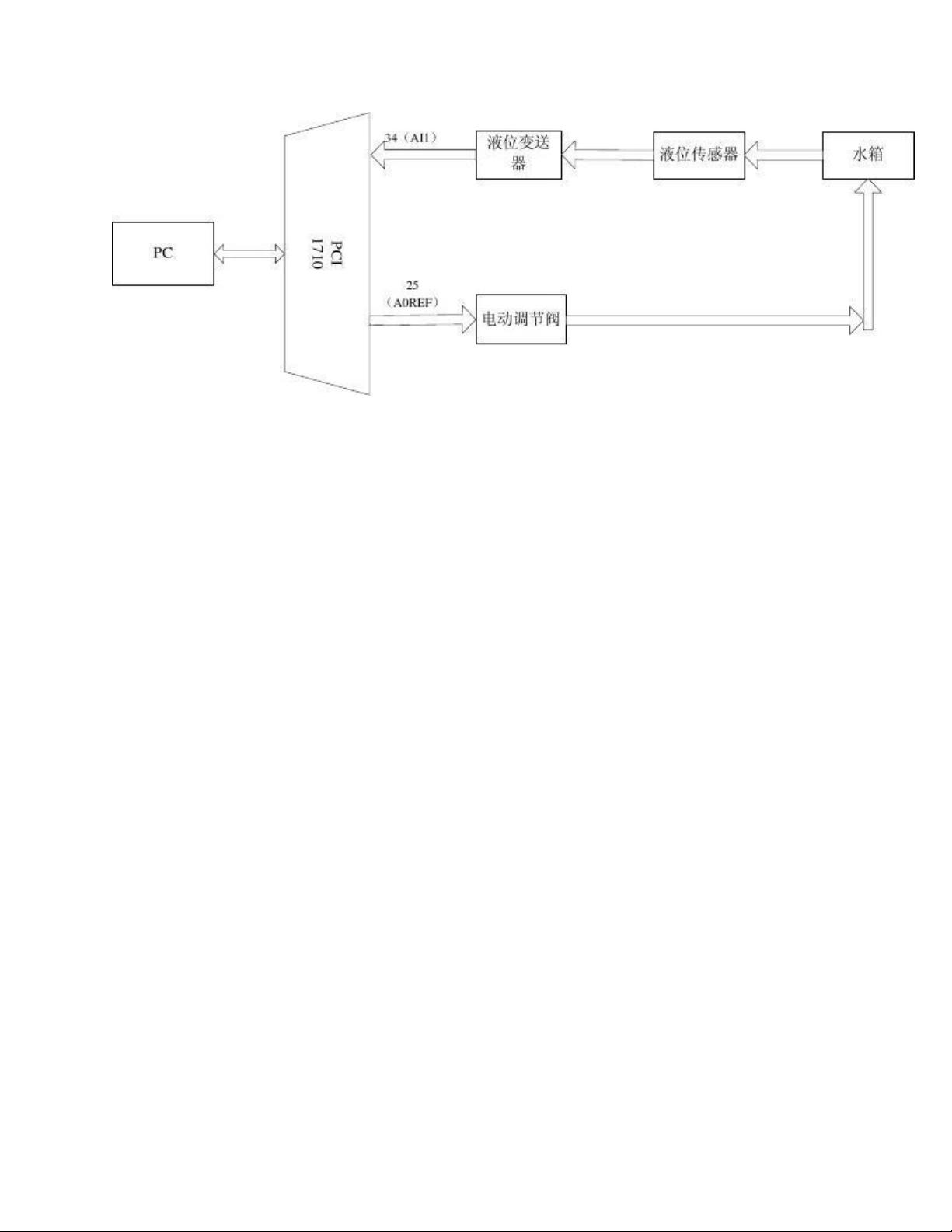
,设计开发了单容水箱的系统的总监控界面,定义了外部变量,用于和研华板卡PCI —
1710模块的输入输出部分对应,来实时显示液位值的大小,建立的动画连接,编写了自动
控制程序,实现了单容水箱控制系统的自动控制,并且实现了液位值实时曲线历史曲线和
历史数据的实时报警历时报警的显示。
第四章
针对单容水箱液位控制系统,对其在变频器中的开发进行了介绍,监控界面可以用第二章
已经设计好的,本设计应用的是日本三菱公司的D700系列的变频器,通过在变频器中设
置PID 参数以及控制目标值等参数最终实现对单容水箱的液位实现稳定控制。
第五章
主要针对双容水箱液位控制系统的特点,对各种经典控制进行比较。在本文中,液位控制
系统中的水箱为控制对象,液位为控制量。为了使液位的控制达到一定
的精度,并且具有较好的动态性能,采用了区别于传统控制方式的串级控制。这样使
控制系统能够达到更好的控制要求,提高了系统的控制性能。
第二章 控制对象及算法简介
2.1被控制变量的选择
被控变量的选择是控制系统的核心问题,被控变量选择的正确与否会直接关系到生产
的稳定性、产品产量和质量的提高以及生产安全与劳动条件的改善。对于任何一个控制系
统,如果被控变量选择不当,即便配备再好的自动化仪表,使用再复杂、先进的控制规律
也不能达到预期的控制效果。



剩余205页未读,继续阅读
2009-03-11 上传
2021-12-08 上传
2021-09-24 上传
2023-07-05 上传
2024-03-25 上传
2021-10-10 上传
2022-05-10 上传

智慧安全方案
- 粉丝: 3834
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







