Webots仿真教程:快速创建与控制器编程
需积分: 50 164 浏览量
更新于2024-09-10
收藏 1.24MB PDF 举报
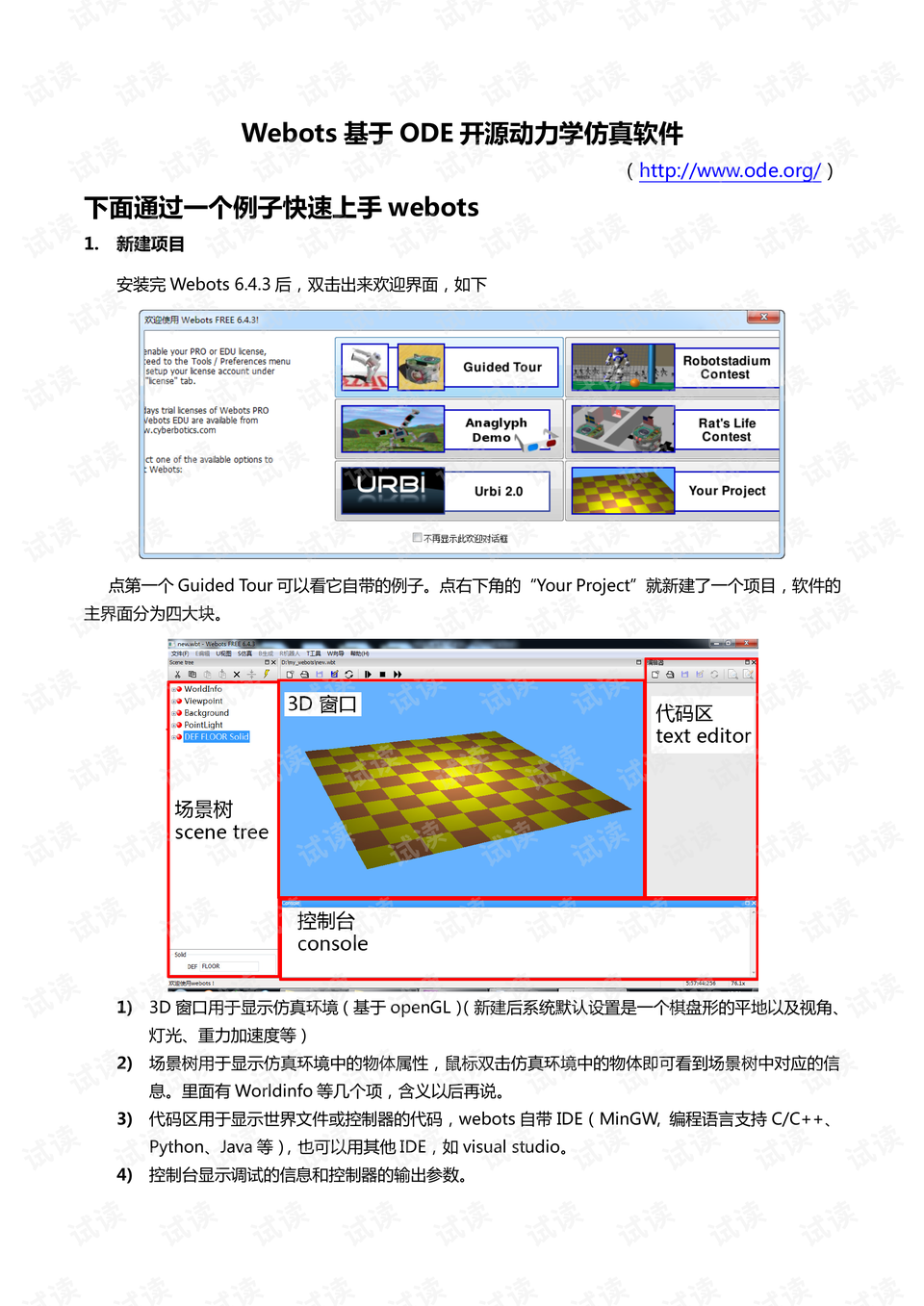
"Webots是一款用于机器人仿真的软件,它基于ODE开源动力学仿真库。该软件提供了一个直观的界面,包括3D窗口、场景树、代码区和控制台四个主要部分,支持C/C++、Python、Java等多种编程语言编写控制器程序。通过控制器,用户可以对机器人进行行为编程,实现各种功能。"
在Webots中,新建项目是开始仿真的第一步。安装后,首次打开软件会看到欢迎界面,可以选择Guided Tour来查看示例,或者点击“YourProject”创建新项目。3D窗口显示的是基于OpenGL的仿真环境,初始设置通常包含一个棋盘地形、视角、灯光和重力设置。场景树则列出了所有物体及其属性,双击物体可以在场景树中查看具体信息。代码区用于编辑世界文件和控制器代码,Webots内置了MinGW IDE,支持多种编程语言。控制台则用于显示调试信息和控制器的输出。
控制器是Webots中实现机器人行为的关键。它是机器人操作系统,允许机器人执行特定任务。Webots支持C、C++、Java、Python和Matlab等语言编写控制器。每个机器人可以有多个控制器,但在任何时刻只能运行一个。创建控制器的步骤包括通过向导选择新项目目录和机器人控制器类型,然后指定控制器文件名和存放位置。例如,创建一个名为“turn”的C语言控制器,会自动生成模板代码,用户可以在此基础上修改,比如编写一个让机器人连续旋转的简单程序:
```c
#include<webots/robot.h>
#include<webots/differential_wheels.h>
#define TIME_STEP 32
int main(int argc, char **argv) {
wb_robot_init();
// 设置轮子速度
wb_differential_wheels_set_speed(1.0, -1.0);
while (wb_robot_step(TIME_STEP) != -1) {
// 控制器循环,让机器人持续旋转
}
wb_robot_cleanup(); // 清理资源
return 0;
}
```
这段代码定义了一个简单的控制器,它设置左右轮速度差为1.0,使得机器人原地旋转。`wb_robot_step(TIME_STEP)`函数负责模拟时间步进,直到仿真结束。在循环中,机器人将持续按照设定的速度旋转。`wb_robot_cleanup()`在仿真结束时释放相关资源。
通过这样的方式,Webots提供了强大的功能,允许用户构建复杂的机器人模型并编写控制器,进行实时仿真和测试,为机器人研究和教育提供了便利。无论是初学者还是专业人士,Webots都是一个值得探索和使用的强大工具。
下载后可阅读完整内容,剩余5页未读,立即下载
250 浏览量
156 浏览量
168 浏览量
2025-01-25 上传
816 浏览量
252 浏览量
212 浏览量

love_li910802
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 3D3S V10幕墙系统操作手册详细指南
- 使用Linq实现GridView的三层结构增删改查操作
- 8PSK与Trellis编码调制(TCM)结合Viterbi译码研究
- 通信BTS载频板电路图及元器件详解
- NenEngine: 开源C++轻量级OpenGL/Vulkan Sprite引擎
- 商城购物车数量加减器效果的jQuery插件
- 学生档案管理系统课程设计报告概述
- Struts2漏洞利用工具:服务器攻击与管理功能集成
- 掌握Android平台下的MQTT推送技术
- Android点击导航实现侧滑功能的实用Demo
- Broadcom Win7 x64网卡驱动57788/577xx下载指南
- 动感音乐网:基于SQL2005和JSP的全面音乐分享平台
- Docker环境下的React项目开发与部署指南
- DLL劫持漏洞测试与防御分析
- PHP开源项目KoalasToTheMax-master探究
- 8种CSS3阴影效果快速应用插件shadow.css











