"高新轮型机器人驱动设计与控制系统研究"
版权申诉
169 浏览量
更新于2024-02-20
收藏 1.13MB DOC 举报
he most commonly used nowadays, which can replace human labor to complete tasks such as handling, cleaning, and scanning. This document discusses the current development status of mobile robots both domestically and internationally, summarizes key technological trends, and proposes the research content of this study, which is the design of the wheel-based robot mechanism and drive.
Firstly, the structure design of the wheeled robot is completed, the overall system motion plan is formulated, including the design of drive wheels and steering wheels assemblies. This involves the selection of motors, the design of transmission mechanisms, strength verification, and the design of components such as wheels, all completed using industrial design software UG for 3D modeling. In addition, further analysis is conducted on system stress distribution and reliability.
Secondly, a detailed introduction is provided on the drive control system of the wheeled robot, economically selecting chip types and improving circuit design, finally completing the programming control process and writing corresponding code. Through a series of comprehensive analyses, the structure and control system of the high-tech wheeled robot are made more perfect and reliable, able to meet the needs of the times and with significant research significance.
Keywords: wheeled robot; drive mechanism; UG; control system; reliability

第2章 轮型机器人结构设计
2.1 机器人运动方式的选择
一般来看,对于移动机器人,其常用的运动形式是通过轮子、履带以
及腿足来实现的。与此同时,我们通过查阅参考文献[2]中的具体对比,以
及结合课题任务,因而确定选用轮型的移动机器人。于此可知,此类运动
结构能够满足实际要求,行驶快捷,占用空间较小,从而适宜用于狭窄室
内;除此,所需能源驱动不高,节能减排,符合我国的可持续发展理念;
而且综合性能稳定可靠。
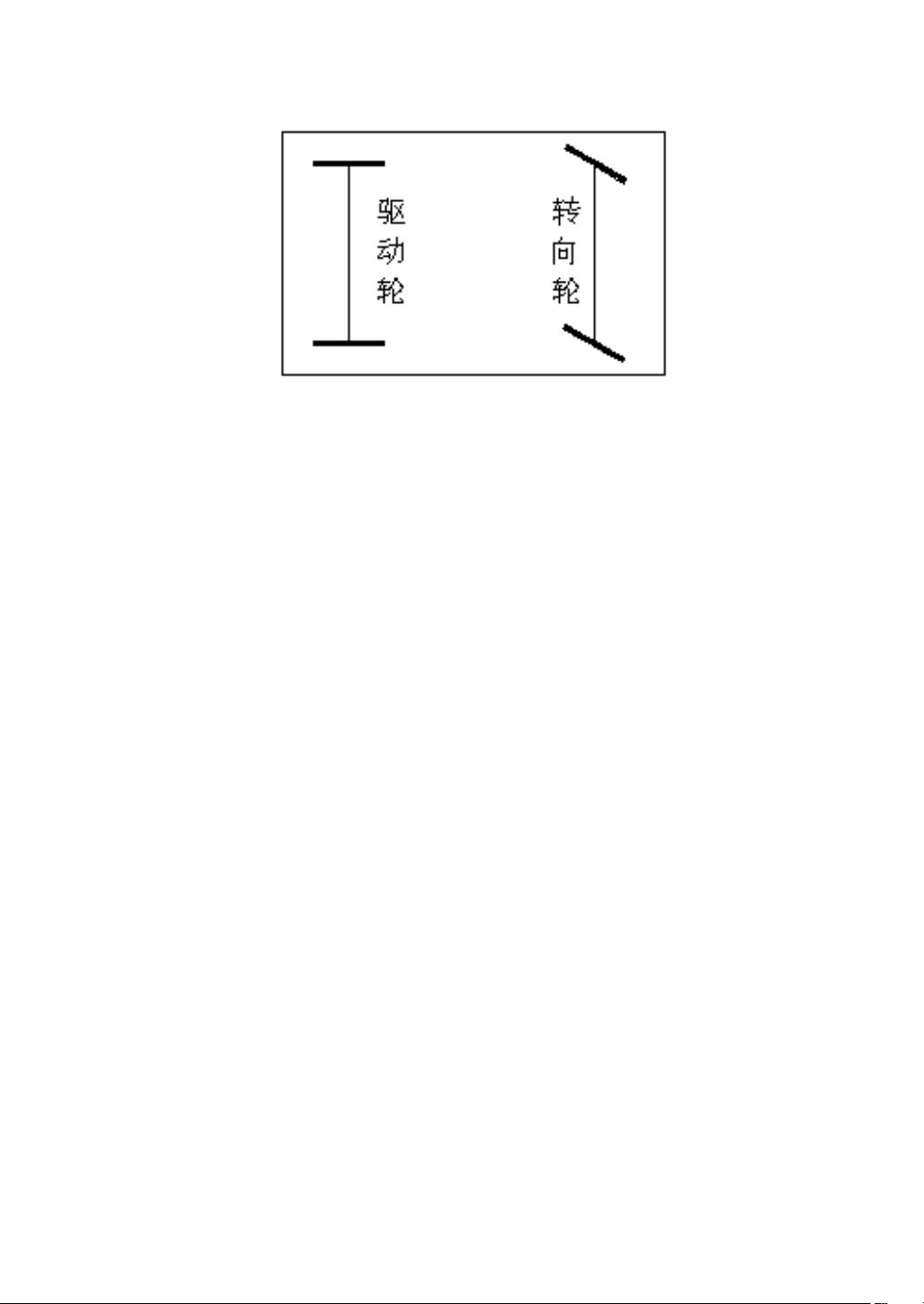
2.2 轮型机器人驱动方案的选择
接着,我们从参考文献[5]中查知,对于轮型机器人,其驱动结构的种
类依次如下图所示:
图 2-1 驱动结构
图 2-2 前轮驱动兼转向结构
剩余32页未读,继续阅读
2023-07-11 上传
2023-07-12 上传
2023-07-12 上传
2021-06-26 上传
2023-07-12 上传
2023-02-27 上传

omyligaga
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 创建个性化的Discord聊天机器人教程
- RequireJS实现单页应用延迟加载模块示例教程
- 基于Java+Applet的聊天系统毕业设计项目
- 从HTML到JSX的转换实战教程
- 轻量级滚动到顶部按钮插件-无广告体验
- 探索皇帝多云的天空:MMP 100网站深度解析
- 掌握JavaScript构造函数与原型链的实战应用
- 用香草JS和测试优先方法开发的剪刀石头布游戏
- SensorTagTool: 实现TI SensorTags数据获取的OS X命令行工具
- Vue模块构建与安装教程
- JavaWeb图片浏览小程序毕业设计教程
- 解决 Browserify require与browserify-shim冲突的方法
- Ventuno外卖下载器扩展程序使用体验
- IIT孟买医院模拟申请webapp功能介绍
- 掌握Create React App: 开发Tic-Tac-Toe游戏
- 实现顺序编程与异步操作的wait.for在HarmonyOS2及JavaScript中
