MATLAB/Simulink控制算法建模指南4.01版详解:状态流与接口设置
需积分: 5 77 浏览量
更新于2024-06-22
收藏 5.59MB PDF 举报
MATLAB Simulink建模标准协议第四版(下)是一部针对控制算法建模的专业指南,它结合了MATLAB、Simulink和Stateflow这三种强大的工具。该文档版权归JMAAB所有,于2017年8月1日进行了修订。本部分主要关注以下几个关键知识点:
1. **控制算法建模** - 该章节提供了在MATLAB、Simulink和Stateflow环境中设计和实现控制算法的详细指导原则。这包括对模型结构、变量设置、接口管理以及代码组织的规范。
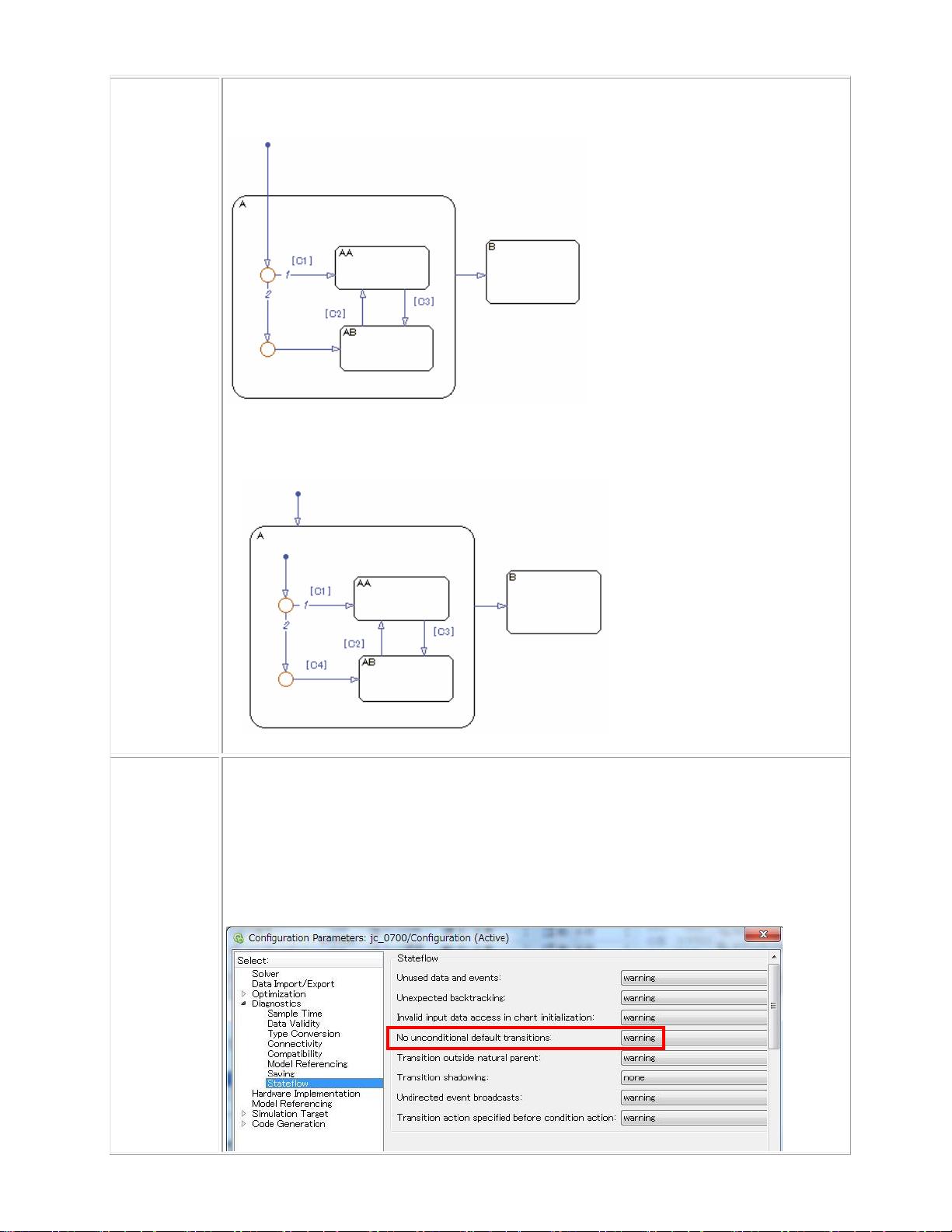
- **Stateflow变量设置** - Stateflow端口名称(db_0123)的管理是重要的一步,确保正确的数据流和通信。未使用的数据(jc_0700)需要被谨慎处理,避免占用不必要的资源。
- **接口信号和参数** (db_0122) - 描述了如何正确配置Stateflow与Simulink之间的信号和参数,保证模块间的协同工作。
- **内部信号和局部辅助变量** (db_0125) - 内部信号的作用域和辅助变量的定义对于模型的可维护性和性能至关重要。
- **索引使用规则** - 第一索引中的数字选择(jc_0701)和参数与常量管理(jc_0702)需遵循特定的标准,以保证代码的清晰和一致性。
- **Stateflow中的指针** (jm_0011) - 指针的使用是Stateflow高级功能的一部分,可能涉及到状态机的复杂逻辑或数据结构。
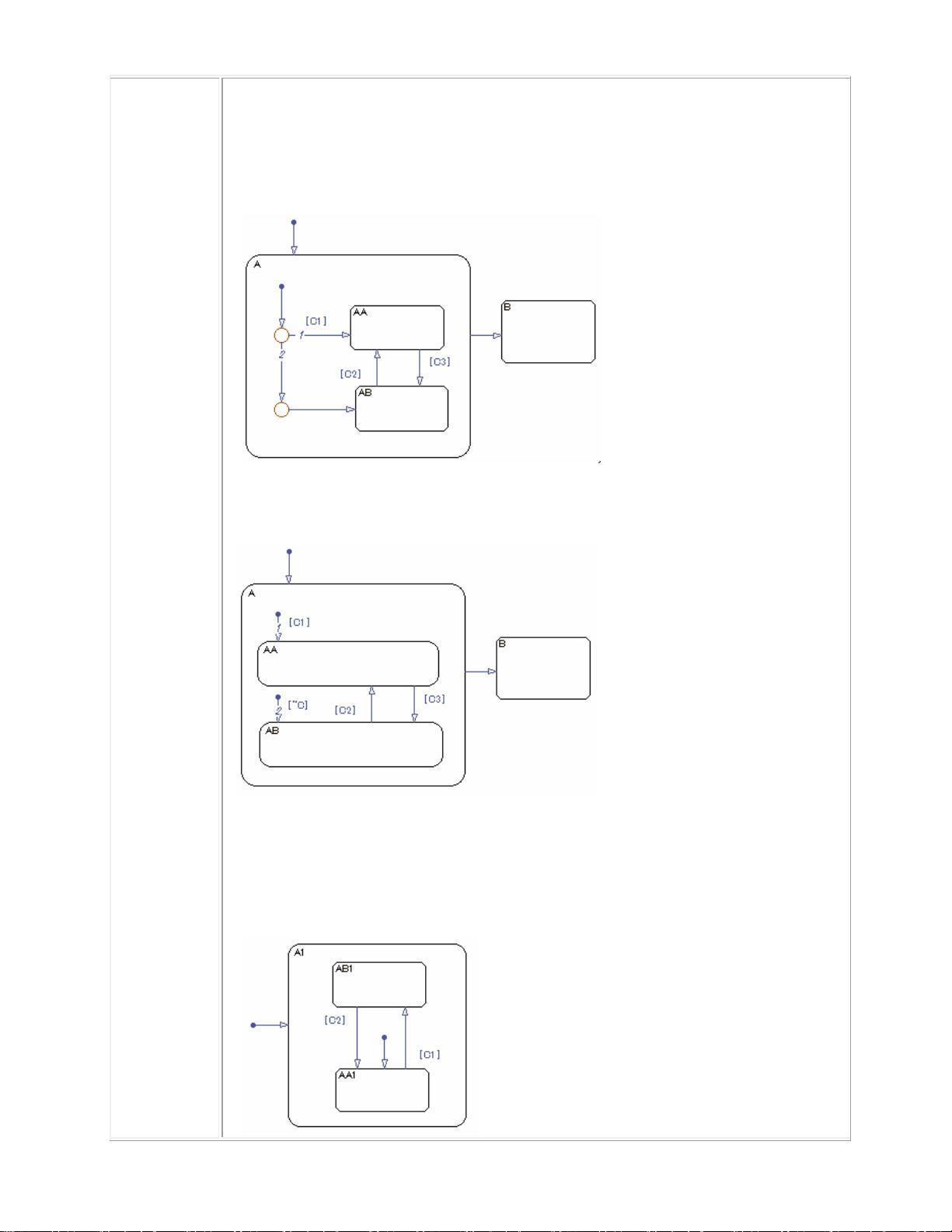
2. **状态迁移** - 5.2节详细介绍了状态迁移的基本外观,包括状态流迁移图形的设计原则(db_0129)以及状态机中的状态组织方式(db_0137)。这部分内容对于理解状态机的生命周期管理和行为至关重要。
通过遵循这些指南,用户可以创建出高效、一致且易于理解的控制算法模型,确保在实际工程应用中的可靠性和效率。对于从事MATLAB Simulink开发的专业人士来说,掌握这些标准对于提升工作效率和代码质量具有重要意义。
© Copyright 2013JMAAB. All rights reserved.
16
5.2. Basic appearance of state transition 状态迁移的基本外观
5.2.1. db_0129: Stateflow transition appearance 状态流迁移外观
ID: Title
ID: 标题
db_0129: Stateflow transition appearance
db_0129: 状态流迁移外观
Priority 优先级
Strongly Recommended 强烈推荐的
Scope
适用范围
MAAB
MATLAB
Version
MATLAB 版本
All
所有版本
Prerequisites
先决条件
Description
描述
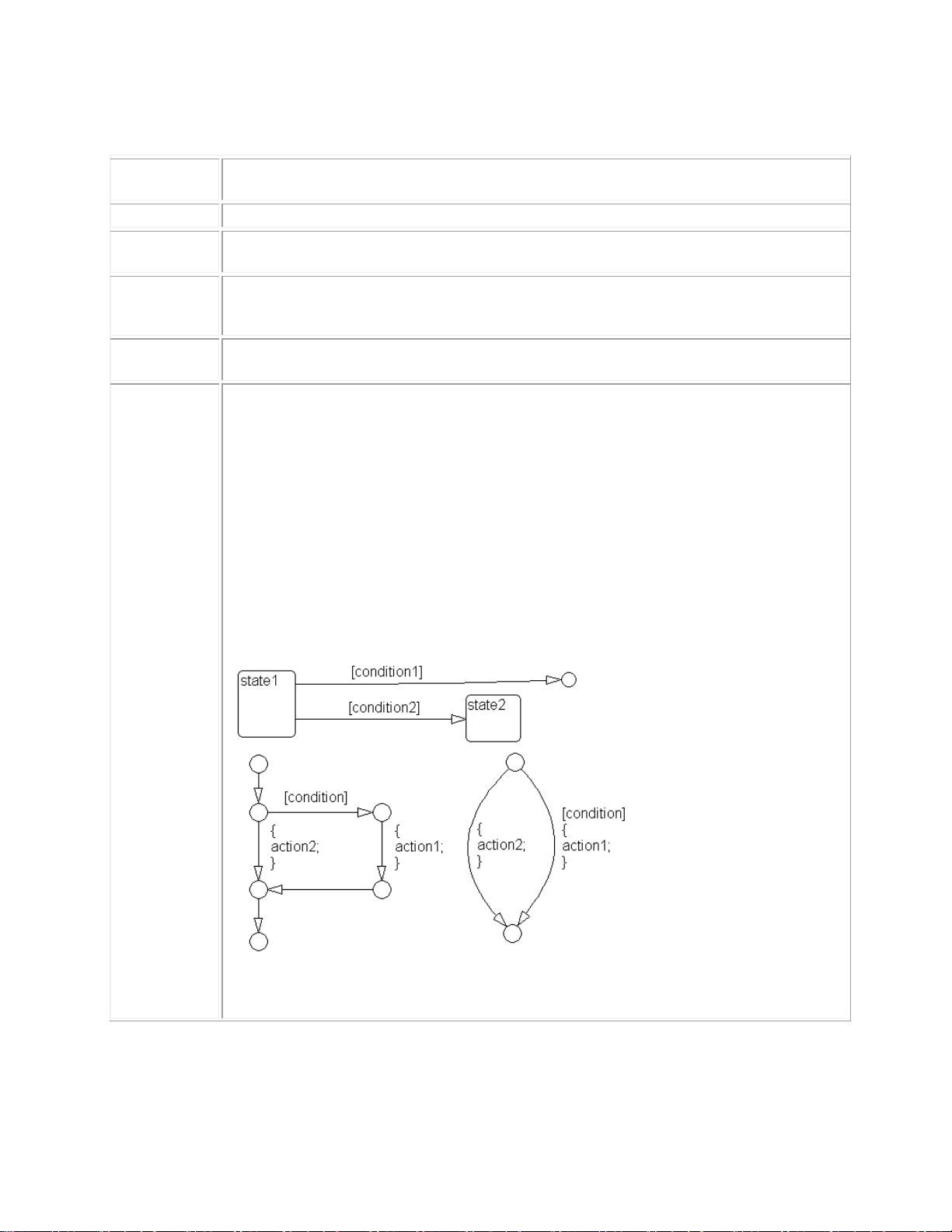
・In Stateflow transitions, the following regulations are applied:
在状态流迁移中,以下规则适用:
Do not cross each other as much as possible.
尽量不要互相交叉。
Do not draw upon the other.
不要在另外一个上面进行绘制。
Do not cross any states, junctions or text fields.
任何状态、交汇连接点或文本域不要交叉。
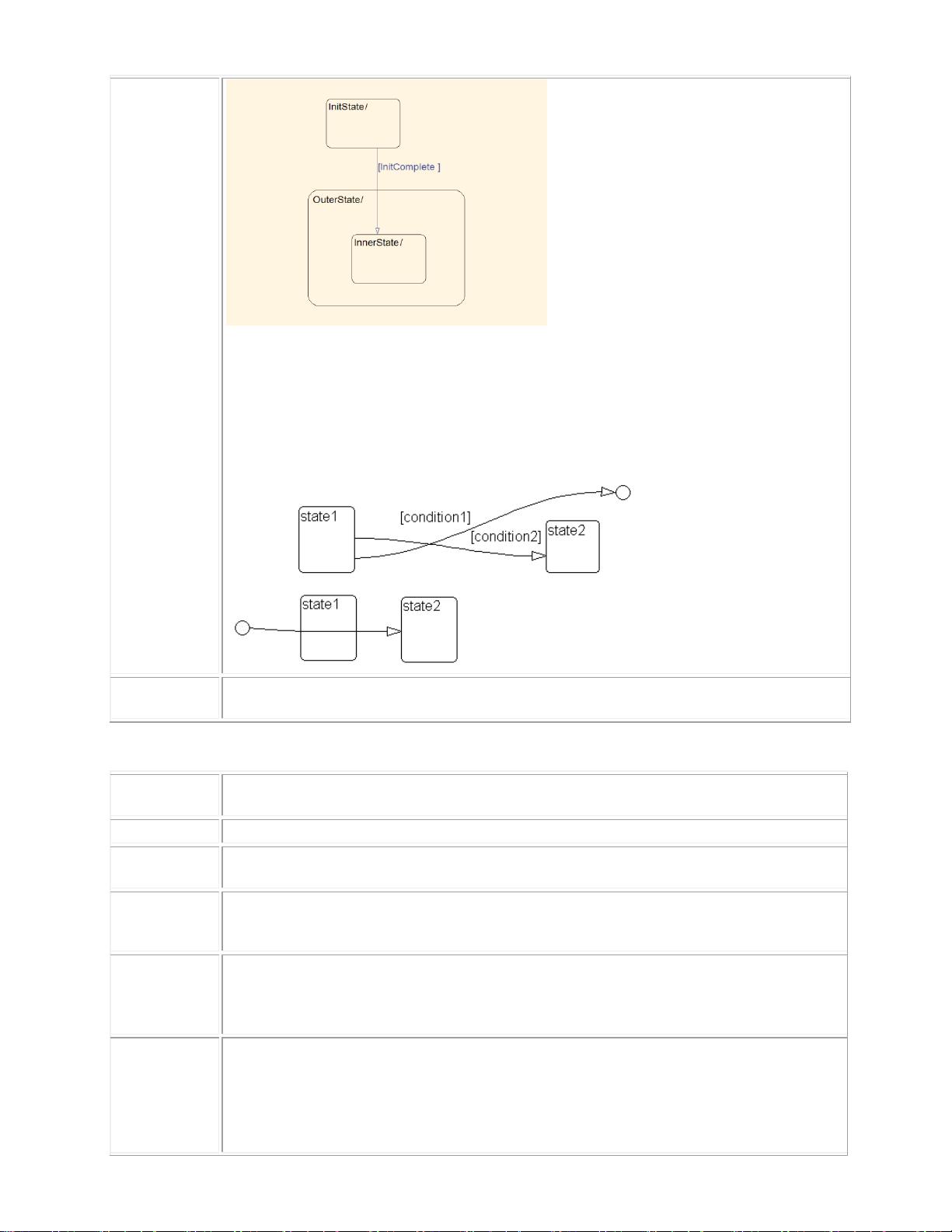
However, crossing with forced transition from external states to internal states is
possible.
然而,从外部状态向内部状态强制迁移,交叉是可以的。
・For transition labels, set to show visual relationships with the corresponding transition.
对于迁移标签,进行设置以显示出相应迁移的可视化关系。
Correct:正确:
Correct:正确:
Transition crosses state boundary to connect to substrate
迁移穿过状态边界连接到子状态。
剩余174页未读,继续阅读
点击了解资源详情
515 浏览量
2018-09-23 上传
185 浏览量
2024-05-08 上传
2009-02-08 上传


qq_34309267
- 粉丝: 223
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
