

青岛大学硕士学位论文
4
展的历程分为三个阶段,第一阶段是比较原始的阶段,主要靠具有丰富经验的相关
专家通过感官判断故障,应用起来比较简便也比较高效,而且还可以节省人大的人
力物力成本,不过仅仅依靠专家的感官,准确率难以保证,因此早期轨道交通车辆
起步时人们就意识到对其运行状态的监测诊断很有必要,但是科技水平有限,无法
实现计算机自动识别;第二阶段是基于材料寿命分析阶段,根据设备的工艺和材质
可以判断安全使用的年限,通过对材质的专业分析,结合实践经验,可以预测设备
的使用寿命进而在安全使用寿命的区间内使用,一旦超出安全使用期限就可以将其
更换以避免故障的发生,不过该方法依然具有精确度不够高的问题,没有科学的计
算数据依然存在着细小的无法避免的误差;第三阶段是基于传感器的电脑分析阶段
[9]
,这也是当前的主流方向,实现了计算机智能识别,基于计算机的大数据分析结
合精密的传感器采集可靠现场信息设计的故障诊断办法,由于科学计算机的处理,
可靠性和准确性得到巨大的提升,也是现阶段主要的诊断方法,计算机的识别可以
避免很多因素的影响,快速、便捷以及高效的诊断技术满足了现阶段对滚动轴承故
障诊断的要求,并具有准确、可靠的特点
[10]
。
智能诊断研究领域根据诊断方式来定义,可分为传统诊断技术和智能诊断技术
[11]
,当前应用的主要是智能诊断技术,传统阶段是研究高度达不到智能诊断的要求,
随着技术的日益改进,智能诊断技术已经达到了很高的技术层面,适应了轨道车辆
故障诊断的实际需求。目前研究方向上具有多分支的结构,衍生了很多重要的诊断
技术,比如神经网络技术、支持向量机以及专家系统诊断,专家系统诊断技术目前
比较热门,科研工作者正在着力研究专家系统在故障诊断上的应用。在一个故障诊
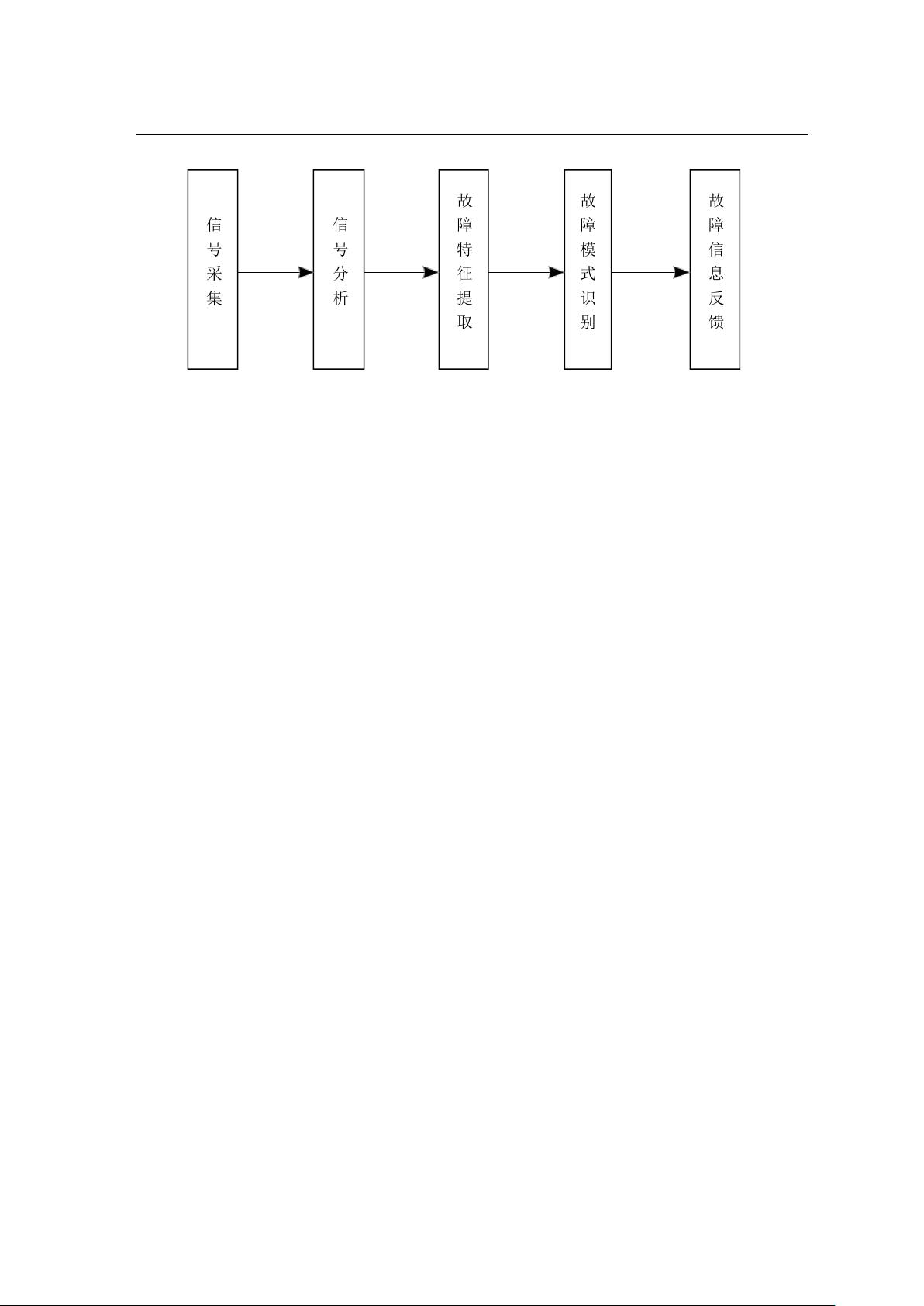
断系统中,信号的采集是第一步也是基础,有用的信号是指能够直接或者间接反映
故障特征的信号,如何采集有用的信号是整个监测诊断系统的实现基础,因此对原
始信号采集的可靠性需要保证,根据不同的采集对象,通常我们会使用加速度、温
度、电压或电流等信号作为传感器的采集对象
[12]
。然后故障的提取这一步也是非常
关键的步骤,系统能否准确地识别故障类型完全靠故障的提取能否具有故障信号的
代表性,可以很好地提取故障隐藏的信号的特征是后面的算法识别的保证,算法的
设计也比较重要,合适的算法才可以很好的诊断出故障的类型,对算法的选取以及
优化工作时很重要的工作环节,然后上位机设计人机交互监测诊断界面,将采集的
原始信号直观地展示在界面上。故障诊断流程图如图 1.1 所示。
剩余54页未读,继续阅读


2201_75761617
- 粉丝: 22
- 资源: 7339
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- VMP技术解析:Handle块优化与壳模板初始化
- C++ Primer 第四版更新:现代编程风格与标准库
- 计算机系统基础实验:缓冲区溢出攻击(Lab3)
- 中国结算网上业务平台:证券登记操作详解与常见问题
- FPGA驱动的五子棋博弈系统:加速与创新娱乐体验
- 多旋翼飞行器定点位置控制器设计实验
- 基于流量预测与潮汐效应的动态载频优化策略
- SQL练习:查询分析与高级操作
- 海底数据中心散热优化:从MATLAB到动态模拟
- 移动应用作业:MyDiaryBook - Google Material Design 日记APP
- Linux提权技术详解:从内核漏洞到Sudo配置错误
- 93分钟快速入门 LaTeX:从入门到实践
- 5G测试新挑战与罗德与施瓦茨解决方案
- EAS系统性能优化与故障诊断指南
- Java并发编程:JUC核心概念解析与应用
- 数据结构实验报告:基于不同存储结构的线性表和树实现
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


