ZoneDefense:二维网格的无虚拟通道容错路由新策略
需积分: 5 106 浏览量
更新于2024-08-26
收藏 1.48MB PDF 举报
"ZoneDefense是一种无虚拟通道的二维网格容错路由算法,旨在为多核处理器的片上通信提供可靠的解决方案。该算法面对的主要问题是处理网络边缘的故障,防止网络死锁的发生。传统的解决方法可能通过禁用故障节点或把所有故障聚集成一个故障块,但这会牺牲大量无故障节点。ZoneDefense路由策略则创新性地将故障包含在凸形故障块中,并将故障块的位置信息分散到对应的列中,形成防御区。数据包能够预知故障位置,从而避开故障,提高容错能力。与现有算法相比,ZoneDefense在容忍更多故障的同时,减少了无故障节点的损失。此外,即使在无故障情况下,ZoneDefense也不会降低网络性能,而在有故障的情况下,其性能表现与现有算法相当。"
ZoneDefense路由算法的核心在于它的防御区概念,这是一种利用故障信息提前规划路径的方法。当网络中出现故障时,受影响的节点会形成一个故障块,而这个故障块的信息会被传播到相应的列中。每个知道这些信息的节点都会成为防御区的一部分,帮助数据包在传输过程中避开故障区域,确保通信的连续性和效率。
在二维网格网络-on-chip (NoC)架构中,路由策略至关重要,因为这些网络通常面临着高密度、高带宽和低延迟的要求。ZoneDefense通过不依赖虚拟通道,降低了硬件复杂度,这对于资源受限的片上系统尤其有利。同时,它采用的二维网格拓扑结构有利于简化路由逻辑和减少功耗。
无虚拟通道的设计使得ZoneDefense在资源利用率和效率方面具有优势,因为虚拟通道的使用通常会增加额外的存储需求和调度复杂性。此外,通过考虑网络边缘的故障情况,ZoneDefense增强了网络的边缘鲁棒性,这是许多传统方案忽视的。
Turn model是路由算法中的另一个关键元素,它定义了数据包在网格网络中转向的规则。ZoneDefense可能结合了一种特定的转向模型,允许数据包在遇到故障时灵活改变方向,以确保路由的成功。
ZoneDefense是一种创新的容错路由技术,它在保持网络性能的同时,提高了对故障的容忍度,减少了对无故障节点的牺牲,对于构建可靠和高效的多核处理器通信系统具有重要意义。
FU et al.: FAULT-TOLERANT ROUTING FOR 2-D MESHES 115
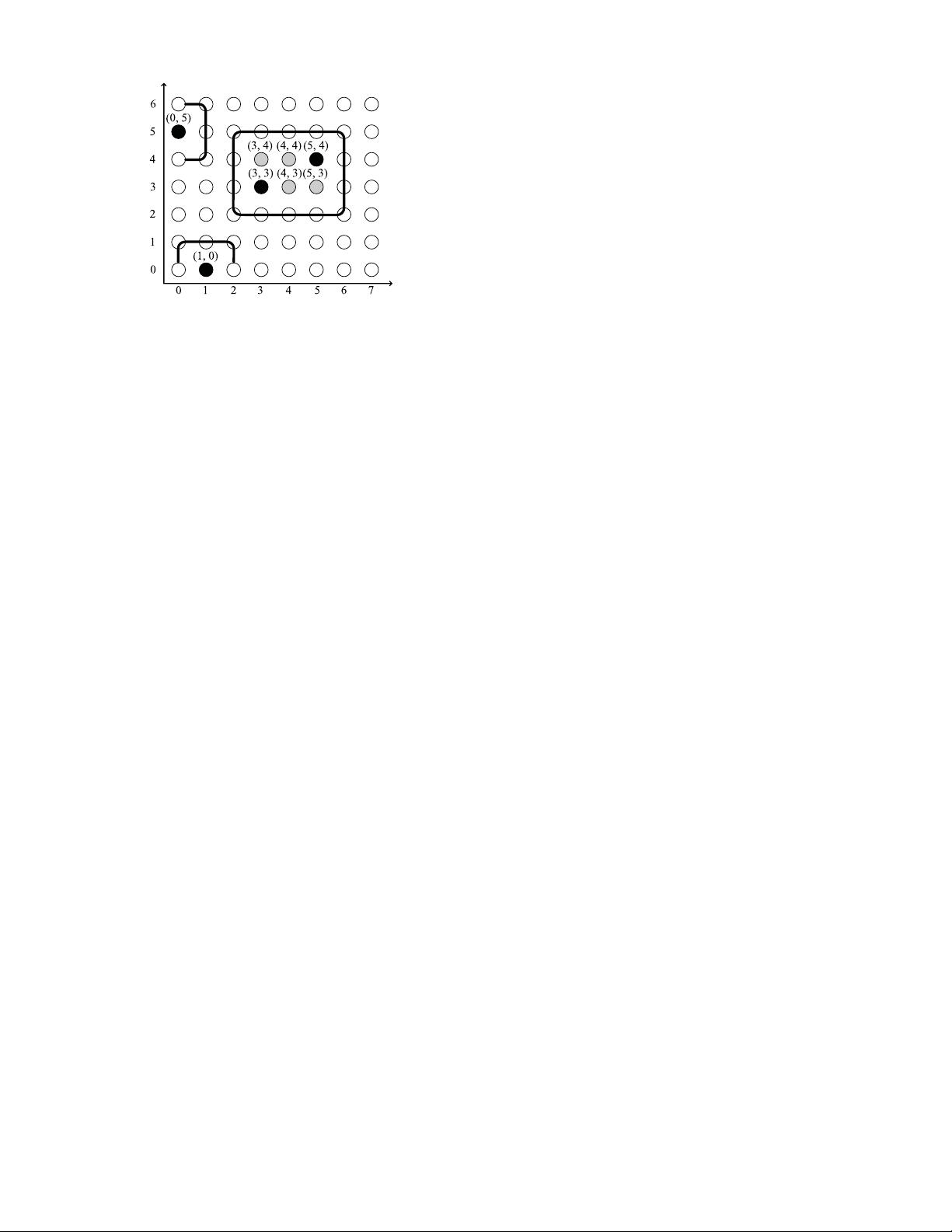
Fig. 4. Faulty blocks without shared boundary channels. Dark nodes represent
faults and gray nodes indicate unsafe nodes.
According to Definition 4, node (4, 3) changes to unsafe in
the second iteration because it has a danger neighbor (3, 3)
in x-dimension and a semi-safe-y neighbor (5, 3). Meanwhile,
nodes (5, 3), (3, 4), and (4, 4) also change to unsafe according
to Definition 4. Faulty blocks are formed in two iterations.
It is worthy to note that allowing faulty blocks to share
boundaries could further reduce the number of sacrificed
fault-free nodes. However, shared boundaries will significantly
increase the routing complexity. The discussion about the
tradeoffs between the number of sacrificed fault-free nodes
and the routing complexity is left as the future work.
III. R
ELATED WORK
Since the NoCs this paper concerns do not have vir-
tual channels, the fault-tolerant routing algorithms rely-
ing on virtual channels, such as [12], [15]–[17], are not
reviewed in this section. Furthermore, there is another kind
of fault-tolerant routing algorithms, stochastic algorithms.
Stochastic routing algorithms enhance NoC reliability by
sending multiple replicated packets through redundant routes,
such as the probabilistic gossip flooding algorithm [18] and
N-Random walk algorithm [19], or by deflection, such as [20],
[21]. Although stochastic routing algorithms can be highly
resilient, they also face some design challenges, such as
high energy and bandwidth consumption. Thus, this paper
mainly focuses on nonstochastic routing algorithms. There
are some flow control techniques also can be used to avoid
deadlock, such as the bubble flow control [22] and the one
proposed in [23]. Since this paper focuses on wormhole-
switched networks, those flow control techniques will not be
reviewed in this section.
Fault-tolerant routing algorithms designed for networks
without virtual channels can be categorized into two classes,
turn model-based and segment-based. For example, Glass
and Ni [9] proposed a nonminimal version of negative-first
routing [6].Wu proposed a fault-tolerant routing based on
odd–even turn model [10]. Zhang et al. [11] proposed a
reconfigurable router to tolerate one faulty block.
Fick et al. [24], [25] proposed a distributed algorithm
to reconfigure the routing table. Fu et al. [26] proposed a
multiple-round dimension-order routing.
Segment-based routing classifies networks into subnets, and
subnets into segments [27]. By placing a bidirectional turn
restriction in each segment, the network can be guaranteed
deadlock free. Cooperating with the logic-based distributed
routing [28] or universal LBDR [29], segment-based routing
provides a way to improve the reliability of NoCs.
We should note that fault-tolerant routing algorithms are
expected to be high resilience, high performance, high scala-
bility, and low cost. However, these objectives are somewhat
conflicting. Therefore, there is a tradeoff in designing fault-
tolerant routing.
For example, algorithms relying on off-line analysis with
global fault information, such as those segment-based routing
algorithms [26], [27], [29], can tolerate more faults. However,
for NoCs which cannot afford virtual channels, collecting and
dumping global fault information is usually too expensive.
Routing table provides the flexibility to reconfigure the
network in the presence of faults. However, algorithms relying
on a routing table, such as [24], [30], are not suitable for large-
scale NoCs, especially for those without virtual channels, due
to the cost problem [28].
Logic-based fault-tolerant routing algorithms, such as
in [9]–[11], is low cost. However, the main problem
in [9] and [11] is that only one fault can be tolerated.
Zhang et al. [11] claimed that their algorithm can be extended
to tolerate multiple faults by including them into one convex
faulty block. However, this usually leads to a large number
of disabled fault-free nodes. The main problem in [10] is the
way that is used to handle the faults locating on four network
edges as well as the two columns that are adjacent to the left
and right network edges. For example, if a fault appears at
these places, nodes of the corresponding edge or column are
all disabled. Unfortunately, the number of disabled nodes is
large.
This paper concerns the NoCs without virtual channels. We
believe that this kind of NoC is quite cost sensitive. Therefore,
we select the logic-based fault-tolerant routing algorithms,
such as [10] and [11], as the baseline algorithms. The main
difference between the proposed ZoneDefense routing and
previous work [10], [11] is the use of defense zones. The main
benefit of ZoneDefense routing is the significantly reduced
number of disabled fault-free nodes.
IV. D
EFENSE ZONES
According to [7], a network is deadlock free if all rightmost
columns are removed. As shown in Fig. 3, ES, SW, EN,
and NW turns are necessary to form rightmost columns. To
distinguish them from others, they are called unexpected turns.
Unfortunately, unexpected turns may be introduced if a packet
hits the boundary of a faulty block. To avoid unexpected turns,
we introduce the defense zones, so that packets could find the
faulty block and route around it in advance.
The formation of defense zones is triggered by the detection
of faults using such as build-in self-test techniques [31]. In this
paper, we utilize the dynamic fault model, but assume that no
new fault occurs during a routing process like [10]. However,
in practice, faults may occur at any time. To support dynamic
faults, one can exploit more reliable flow control techniques,
such as APCS [32] and the one proposed in [33]. These
剩余13页未读,继续阅读
2009-11-28 上传
点击了解资源详情
2019-03-16 上传
2021-06-05 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

weixin_38637805
- 粉丝: 4
- 资源: 952
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端协作项目:发布猜图游戏功能与待修复事项
- Spring框架REST服务开发实践指南
- ALU课设实现基础与高级运算功能
- 深入了解STK:C++音频信号处理综合工具套件
- 华中科技大学电信学院软件无线电实验资料汇总
- CGSN数据解析与集成验证工具集:Python和Shell脚本
- Java实现的远程视频会议系统开发教程
- Change-OEM: 用Java修改Windows OEM信息与Logo
- cmnd:文本到远程API的桥接平台开发
- 解决BIOS刷写错误28:PRR.exe的应用与效果
- 深度学习对抗攻击库:adversarial_robustness_toolbox 1.10.0
- Win7系统CP2102驱动下载与安装指南
- 深入理解Java中的函数式编程技巧
- GY-906 MLX90614ESF传感器模块温度采集应用资料
- Adversarial Robustness Toolbox 1.15.1 工具包安装教程
- GNU Radio的供应商中立SDR开发包:gr-sdr介绍
