雷达驱动的3D目标检测:深度学习新方法
需积分: 9 3 浏览量
更新于2024-09-01
收藏 443KB PDF 举报
本文档标题为《20200308_Deep Learning on Radar Centric 3D Object Detection》, 主要聚焦于雷达在3D目标检测中的深度学习应用。随着自动驾驶和机器人技术的发展,对3D对象检测的需求日益增长,然而传统的相机和LiDAR传感器容易受到恶劣天气和光照条件的影响。雷达作为相对抗干扰的传感器,其在这些场景下的表现更具优势。然而,直到最近,深度学习在雷达数据上的应用才逐渐被研究者关注。
该论文创新性地提出了一种基于深度学习的雷达中心3D目标检测方法。作者Seungjun Lee,来自首尔国立大学和韩国AICOLLEGE,通过此研究,他们是首个将深度学习应用于仅依赖雷达数据的3D目标检测模型的研究者。他们注意到公开雷达数据集的缺乏,为了克服这一挑战,作者提出了一种独特的策略:利用大量的LiDAR数据生成雷达类似的数据点云,并结合激进的雷达数据增强技术,以弥补雷达标注数据的不足。
在介绍部分,论文强调了雷达在各种实际应用中的重要性,尤其是在自动驾驶场景中,其在复杂环境下的稳定性和鲁棒性是关键。然而,相比于视觉传感器,雷达数据的处理和解析更具复杂性,这正是深度学习可以发挥作用的地方。通过深度神经网络,研究人员能够学习到雷达信号与3D物体之间的关系,从而实现高精度的目标检测。
深度学习模型的优势在于其强大的特征提取能力,它可以从雷达信号中提取出目标的形状、大小、速度等信息,这些信息对于车辆避障、行人检测等任务至关重要。同时,通过将LiDAR数据转换成雷达数据的形式,可以利用已有的大量标注数据来训练模型,进一步提升模型的性能。
总结来说,这篇论文的主要贡献包括:(1)开发了一种基于深度学习的雷达中心3D目标检测模型;(2)提出了一种将LiDAR数据转化为雷达数据并进行增强的技术,以解决雷达数据标注不足的问题;(3)展示了在实际的自动驾驶场景中,使用雷达进行3D目标检测的可行性。这为未来无人驾驶系统中雷达与其他传感器的融合,以及雷达在极端环境下的智能感知提供了新的研究方向。
Deep Learning on Radar Centric 3D Object Detection
Seungjun Lee
#1
#
Seoul National University, Korea
*
AI COLLEGE, Korea
1
lsjj096@snu.ac.kr
Abstract — Even though many existing 3D object
detection algorithms rely mostly on camera and LiDAR,
camera and LiDAR are prone to be affected by harsh
weather and lighting conditions. On the other hand, radar
is resistant to such conditions. However, research has
found only recently to apply deep neural networks on
radar data. In this paper, we introduce a deep learning
approach to 3D object detection with radar only. To the
best of our knowledge, we are the first ones to demonstrate
a deep learning-based 3D object detection model with
radar only that was trained on the public radar dataset. To
overcome the lack of radar labeled data, we propose a
novel way of making use of abundant LiDAR data by
transforming it into radar-like point cloud data and
aggressive radar augmentation techniques.
Keywords
— object detection, deep learning, neural network,
radar, autonomous driving
I. INTRODUCTION
Due to its broad Real-World applications such as
autonomous driving and robotics, the proper use of 3D object
detection is one of the most crucial and indispensable
problems to solve. Object detection is the task of recognizing
and localizing multiple objects in a scene. Objects are usually
recognized by estimating a classification probability and
localized with bounding boxes. In autonomous driving, the
main concern is to perform 3D object detection with accuracy,
robustness and real-time. Therefore, it makes almost all the
autonomous vehicles equipped with multiple sensors of
multiple modalities to ensure safety: camera, LiDAR (light
detection and ranging), and Radar (radio detection and
ranging).
Currently, with cameras, the most widely adapted vision
sensor to carry out 3D object detection is LiDAR which
outputs spatially accurate 3D point clouds of its surroundings.
While recent 2D object detection algorithms are capable of
handling large variations in RGB images, 3D point clouds are
special in the sense that their unordered, sparse and locality
sensitive characteristics still show great challenges to solve 3D
object detection problems. Furthermore, cameras and LiDARs
are prone to harsh weather conditions like rain, snow, fog or
dust and illumination.
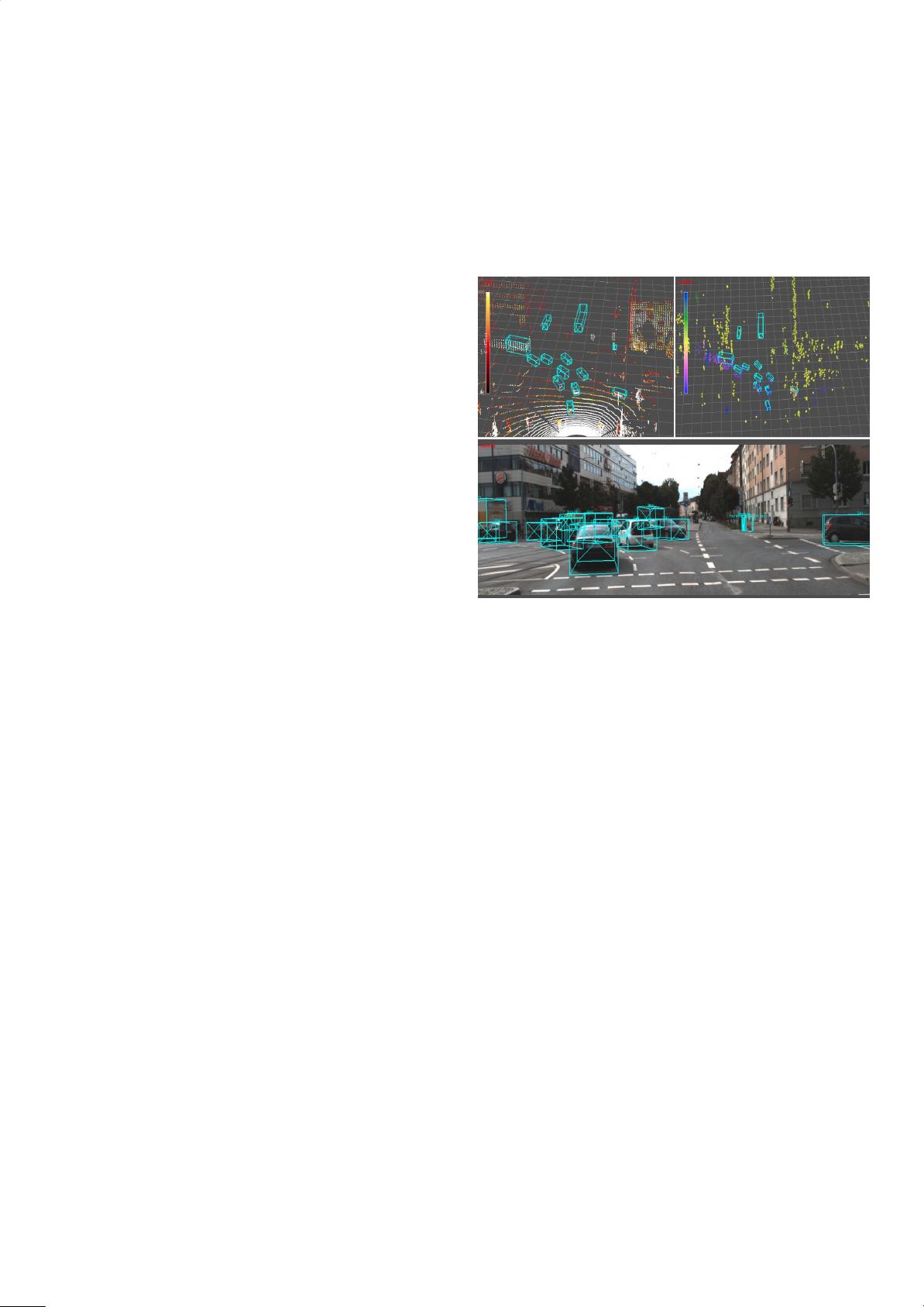
Fig. 1. An Example of radar image (up right) with the corresponding RGB
camera images (down) and LiDAR images (up left) from [10].
On the contrary, automotive radar, being considerably
cheaper than a LiDAR and resistant to adverse weather and
insensitive to lighting variations that provides long and
accurate range measurements of the surroundings
simultaneously with relative radial velocity measurements by
Doppler effect, is widely used within modern advanced driver
assistance and vehicle safety systems. Moreover, the recent
demand for autonomous radar introduced a new generation of
high-resolution automotive “imaging” radar like [10] which is
expected to be a substitute for expensive LiDARs.
However, there exist more difficulties in the development
of radar-based detectors than LiDAR-based ones. As deep
learning is a heavily data-driven approach, the top bottleneck
in radar-based applications is the availability of publicly
usable data annotated with ground truth information. Only the
very recent nuScenes dataset [8] provides non-disclosed type
of 2D radar sensor with sparsely populated 2D points but
without the sampled radar ADC data required for deep radar
detection whereas Astyx HiRes2019 Dataset [10] provides 3D
imaging radar data that contains only 546 frames with
ground-truth labels, which is relatively too small for common
image datasets in the computer vision community.
Even though recent publications have shown that the
radar-camera fusion object detector that exploits both images
and point cloud data can be reliable to some degree in the
下载后可阅读完整内容,剩余3页未读,立即下载
2024-08-05 上传
2020-03-19 上传
2021-09-13 上传
105 浏览量
2021-04-08 上传
2024-08-25 上传
2022-01-23 上传
2021-08-22 上传
187 浏览量

大海里捡宝贝
- 粉丝: 89
 我的内容管理
展开
我的内容管理
展开







最新资源
- 支付宝订单监控免签工具:实时监控与信息通知
- 一键永久删除QQ空间说说的绿色软件
- Appleseeds训练营第4周JavaScript练习
- 免费HTML转CHM工具:将网页文档化简成章
- 奇热剧集站SEO优化模板下载
- Python xlrd库:实用指南与Excel文件读取
- Genegraph:通过GraphQL API使用Apache Jena展示RDF基因数据
- CRRedist2008与CRRedist2005压缩包文件对比分析
- SDB交流伺服驱动系统选型指南与性能解析
- Android平台简易PDF阅读器的实现与应用
- Mybatis实现数据库物理分页的插件源码解析
- Docker Swarm实例解析与操作指南
- iOS平台GTMBase64文件的使用及解密
- 实现jQuery自定义右键菜单的代码示例
- PDF处理必备:掌握pdfbox与fontbox jar包
- Java推箱子游戏完整源代码分享
