探索认知机器人:从工程操作到智能尘埃
需积分: 7 128 浏览量
更新于2024-08-02
收藏 819KB PDF 举报
" Brian Williams 的课程 'Introduction to Cognitive Robots' 主要关注认知机器人的理论与实践,涵盖了不同类型的机器人在探索、导航以及合作任务中的应用。课程目标是理解认知机器人的主要类型及其驱动力,包括工程操作中的不动机器人、导航机器人、协作机器人,并通过案例研究、邀请讲座和最终项目来实现这一目标。课程还强调了自主系统如何利用模型预测或检测微妙故障,例如 NASA 的火星栖息地模拟实验。"
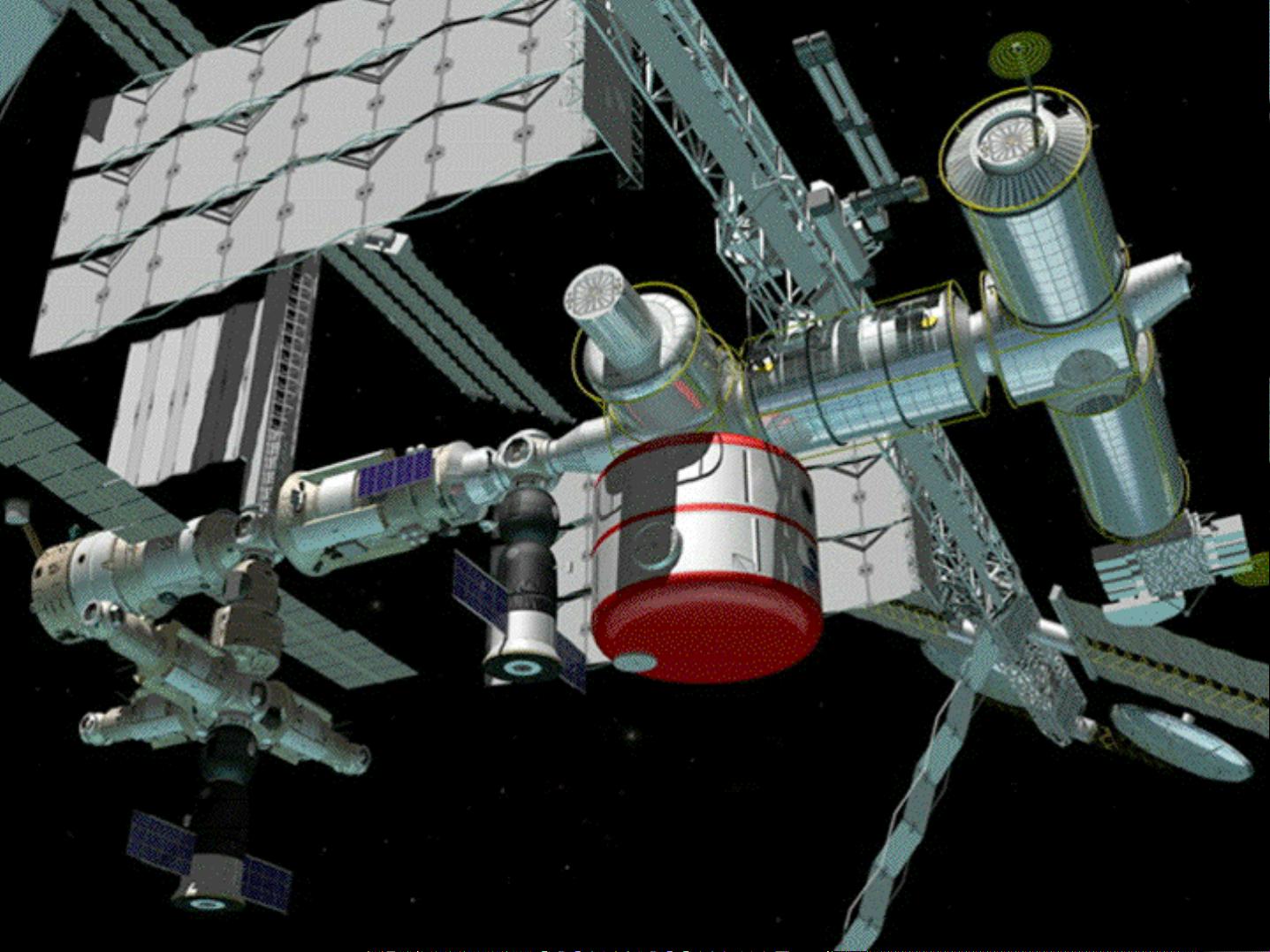
在 Brian Williams 的这门课程中,我们首先会接触到认知机器人的概念,这些机器人能够模仿人类的认知过程,以便在复杂环境中学习、适应和决策。课程通过一系列示例,展示了机器人作为探索者的角色,如在空间中的不移动机器人,它们对于持久而稳定的工程操作至关重要,如 NASA 的火星探测器,这些机器人在无人值守的情况下执行任务,需要具备高度的鲁棒性和自我维护能力。
接下来,课程将探讨能导航的机器人,包括在走廊、野外、水下环境甚至空中运行的机器人。这些机器人需要具备自主导航和环境感知的能力,以应对各种挑战,例如避开障碍物、定位目的地等。其中,火星探测车就是一个很好的例子,它们需要在未知的地形中寻找路径,同时处理可能遇到的各种问题。
此外,课程还将涉及协作机器人,即能够在多机器人系统中协同工作的机器,如太空、空中、陆地和水下的联合任务,以及分布式交通网络和智能尘埃等。这些协作机器人需要复杂的通信和协调机制,以实现集体目标。
课程的一个关键方面是,通过分析自主系统的模型,来预测或检测潜在的微妙故障。例如,NASA 的火星栖息地模拟实验展示了如何利用模型来监控系统的健康状态,当关键参数(如温度、压力)超出预设范围时,系统可以提前预警,确保任务的顺利进行。
课程的实施方法包括案例研究,让学生深入理解实际应用场景;邀请专家进行专题讲座,分享前沿技术和发展;以及最终的项目,让学生亲自设计和实现一个与认知机器人相关的项目,以提升他们的实践能力和创新思维。
Brian Williams 的 'Introduction to Cognitive Robots' 课程提供了一个全面的视角,涵盖了认知机器人学的基础知识、关键技术以及未来趋势,旨在培养出能够理解和设计高级自主系统的专业人才。
Copyright B. Williams
16.412J/6.834J, Fall 02
Immobile Robots in Space
剩余16页未读,继续阅读
2021-06-02 上传
2023-08-15 上传
2023-04-13 上传
2023-10-03 上传
2023-11-23 上传
2023-04-13 上传
2023-11-15 上传

sususu_jl
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
