彩色Petri网的实时多核自动调度模型
需积分: 5 167 浏览量
更新于2024-08-12
收藏 1.74MB PDF 举报
本文主要探讨了实时多核架构(Real-time Multiprocessor System-on-Chip, MPSoC)上一种具有自动并行化功能的彩色Petri网(Colored Petri Net, CPN)模型在任务调度中的应用。彩色Petri网是一种图形化的系统模型工具,它通过节点和边来表示系统的状态转换和交互关系,特别适用于描述并发和同步行为。
作者团队提出了一种新颖的CPN动态调度策略,旨在解决MPSoC平台上实时任务调度中的两个关键问题:依赖检测和任务分派。首先,他们利用CPN对任务之间的依赖关系进行建模,包括真正的依赖、输出依赖、反依赖和结构依赖。这些依赖关系在模型执行过程中可以被自动识别,提高了调度的效率和准确性。这种模型设计考虑到了实时约束的检查,确保任务能在规定的时间内完成,这对于保证系统实时性至关重要。
依赖检测部分,通过彩色Petri网的状态转换,能够有效地识别出任务之间的因果关系,帮助系统理解何时一个任务可以安全地开始,而不会违反其他任务的执行顺序。任务分派则基于模型的并行性特性,通过自动划分和调度任务到不同的核心处理器,优化了资源利用率,减少了执行时间。
为了验证这个调度方案的有效性,研究者们进行了详细的性能评估。他们可能使用了模拟器或者实际的MPSoC平台,通过对比分析不同调度策略的执行效率、延迟和吞吐量等关键指标,展示了新提出的CPN模型在实际应用中的优越性。这种模型不仅有助于提高系统的设计效率,还能提升系统的可靠性和响应速度,对于复杂实时系统的开发和优化具有重要的理论价值和实践指导意义。
这篇研究论文是实时系统领域的一项创新工作,它结合了彩色Petri网的模型表达能力和MPSoC架构的并行特性,为任务调度问题提供了一种新的解决方案,具有很高的实用性和研究价值。
account and proposes a CPN based scheduling scheme. The details
of our proposed scheme will be presented later in this paper.
3. Task-Level Scoreboarding scheduling scheme
This section presents the Task-Level Scoreboarding scheme. The
description focuses on the architecture and processing flow of the
scheme. At the end of this section, the advantages of our Task-Level
Scoreboarding scheme are presented.
3.1. Architecture overview of Task-Level Scoreboarding scheduler
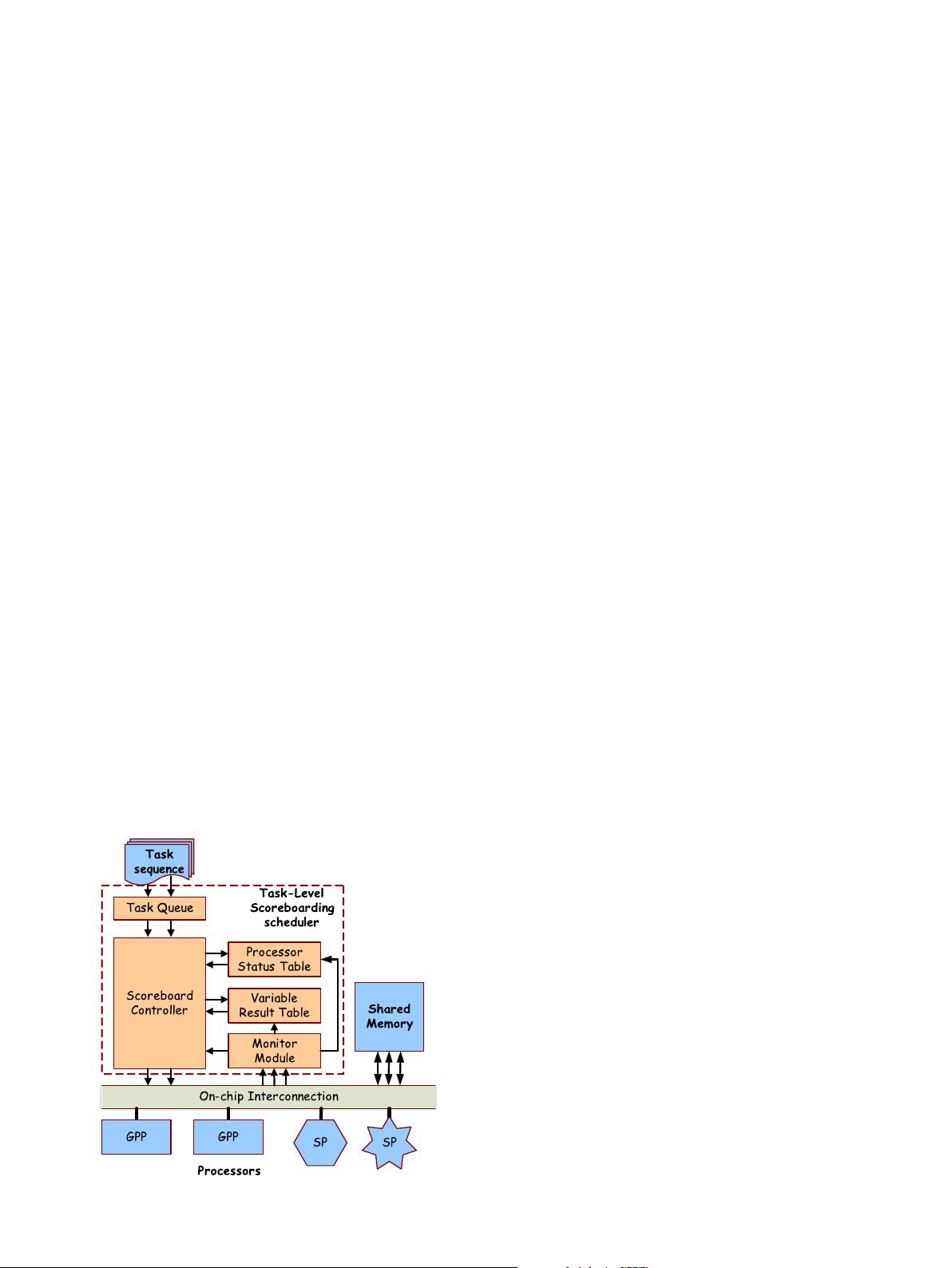
The block diagram of Task-Level Scoreboarding scheduler is
outlined by dashed lines in Fig. 1. The scheduler takes preprocessed
tasks as input, and buffers them in the task queue. Then the score-
board controller fetches tasks from the queue in order, schedules
them, and dispatches them to different processors for out-of-order
execution. Processor Status Table is utilized to record the statuses
of all processors, while the Variable Result Table indicates which
processor will produce the pending result. These two tables help
scoreboard controller to identify inter-task dependences. Monitor
module collects the running information of all processors and up-
date the content of those two tables immediately upon perceiving
a state change. Under the control of the scheduler, all processors
exchange data with shared memory through on-chip interconnec-
tion. Note that the scheduler can be implemented either as a soft-
ware module running on a GPP, or as a standalone hardware
module attached to on-chip interconnection.
3.2. Processing flow of scoreboard controller
Under the control of the scoreboard controller, every task will
undergo the stages shown in Table 1.
3.2.1. Check destination
A task moves to this stage immediately when entering score-
board controller. In this stage, the readiness of destination variable
is checked. The destination is ready if no other active tasks have
the same destination variable. Otherwise, a WAW hazard will be
detected. The task will move forward to the next stage if WAW
hazards do not exist or they are resolved.
3.2.2. Partition
As mentioned before, there may be more than one suitable
processor which a task can be dispatched to. Therefore, a partition-
ing strategy must be employed to choose one as target processor in
this situation. First of all, the controller looks through the statuses
of all processors to check whether there are any free processors
capable to execute the task. If yes, the controller will substitute
the value of the variable PAR with the identifier of the target pro-
cessor. Otherwise, the task will stall until any suitable processor
becomes free.
3.2.3. Issue
The absence of WAW and structural hazards is guaranteed
when a task enters issue stage. The controller will update related
table entries when a task issues.
3.2.4. Read operands
A source variable is ready when no earlier issued tasks intend to
write it. There must be a RAW hazard if either a source variable is
not ready. The scoreboard controller keeps on monitoring source
variables of issued tasks. Once all the source variables are ready,
the processor will access the memory to fetch source operands.
3.2.5. Execution complete
The processor will begin to execute immediately when source
operands have been read.
3.2.6. Write results
A WAR hazard arises when any source variable of earlier issued
tasks is just the destination variable of the completing task. A pro-
cessor will write its result back only when there are not any WAR
hazards. After that, a task is accomplished.
3.3. Advantages over instruction level scoreboarding
In this section, we present the advantages of our Task-Level
Scoreboarding over instruction level scoreboarding, which includes
two aspects:
(1) Task partitioning: When extending traditional scoreboarding
to operate on MPSoCs, we need consider how to partition
tasks to multiple processors. To the best of our knowledge,
few literatures consider task partitioning together with
our-of-order execution. In our proposed scheme, it is conve-
nient to evaluate different partitioning strategies, since the
partition stage is loosely coupled with the scheduling pro-
cess. For demonstration, we will present how to integrate
a greedy partitioning strategy to our Task-Level Scoreboard-
ing in Section 4.5.
(2) Monitoring and profiling: Our Task-Level Scoreboarding mon-
itors and collects the running information of processors, so it
is able to trace the whole execution process and locate
where the hotspot is through profiling techniques. When
applied on reconfigurable platforms, using the profiling
result, our Task-Level Scoreboarding can guide the process
of hardware reconfiguration at runtime to achieve higher
performance.
4. CPN models of Task-Level Scoreboarding
In order to facilitate the verification and evaluation of Task-Le-
vel Scoreboarding we proposed, CPN models are built. This section
concentrates on the structure and execution process of our model.
We discuss how the places and transitions in CPN are built, how
the inter-task dependences are identified, and finally how the par-
titioning strategies are modeled. Besides, taking a greedy algorithm
Fig. 1. Architecture of Task-Level Scoreboarding.
C. Wang et al. / Journal of Systems Architecture 60 (2014) 293–304
295
剩余11页未读,继续阅读
2021-07-13 上传
168 浏览量
103 浏览量
240 浏览量
402 浏览量
191 浏览量
533 浏览量
182 浏览量
485 浏览量

weixin_38545117
- 粉丝: 9
 我的内容管理
展开
我的内容管理
展开







最新资源
- UML统一建模语言全方位指南
- VBS脚本基础教程:条件判断与逻辑运算
- C# 3.0 新特性详解:隐型变量、扩展方法与Lambda表达式
- VBS脚本入门教程6:FSO操作实践
- VBS入门教程5:FSO操作与文本文件创建
- VBS脚本入门教程4:使用WshShell对象控制应用程序
- VBS脚本基础教程:Windows命令与实战示例
- 源码追踪:名家经验与阅读策略
- 20世纪编程革命:OOP起源与发展
- 飞机订票系统实现与管理
- Windows主板BIOS设置详解与图解教程
- JAVA面试必备:基础知识点与异常处理
- 《代码大全2》:软件构建的艺术
- Hibernate入门指南:Java关系数据库持久化与配置详解
- Oracle SOA搭建指南
- C++批判:编程语言趋势与问题分析(第3版)
