PLC控制的机械手设计与动画实现
版权申诉
55 浏览量
更新于2024-07-05
收藏 662KB DOC 举报
"基于PLC的机械手设计"
本文档详细阐述了一个基于PLC(可编程逻辑控制器)的机械手设计项目。机械手设计是多学科交叉的领域,涉及机械、电子、控制和计算机等多个技术领域。该设计旨在满足特定的设计要求,通过分析运动形式、驱动方式和总体结构,构建一个能够完成基础搬运任务的机械手。
在1.1设计要求部分,设计者明确了机械手需要具备的功能和性能指标,这通常包括负载能力、精度、速度和灵活性等方面。1.2运动形式的选择是决定机械手如何执行任务的关键,可能包括直线运动、旋转运动等多种方式。1.3驱动方式的选择则涉及到动力源,如电动、气动或液压,每种方式有其优点和适用场景。1.4总体结构设计涵盖了机械手的骨架、关节和末端执行器,确保其能够稳定且有效地执行任务。
2.机械手手部设计是机械手的核心部分,手部结构设计需考虑到被抓取物体的形状、大小和重量。结构分析和计算分析确保了手部的承载能力和适应性,以便适应不同工件。
3.1章节明确了PLC控制系统对于机械手的重要性,即控制机械手的动作,满足控制要求。3.2中,PLC选型和资源配置是根据机械手的具体需求来选择合适的控制器,以实现精确、高效和可靠的控制。3.3章节详细介绍了PLC程序的编写,这是实现机械手自动化操作的关键,通过编程实现预设的动作序列。
4.动画制作部分,通过18页的内容,展示了如何利用计算机软件创建机械手的三维模型,并制作出模拟实际操作的动态效果,这对于设计验证、用户理解和培训都有很大帮助。
总结,这个基于PLC的机械手设计项目涵盖了从概念到实现的全过程,包括机械结构、控制策略和可视化验证。通过PLC的控制,机械手能够在工业生产中实现自动化、高效率的工作,降低了人工成本,提高了生产效率和安全性,具有显著的实际应用价值。同时,该设计还体现了现代科技在机器人领域的广泛应用,预示着未来制造业将更加依赖智能化、自动化设备。
(6)存在工作死区。
4.多关节机器人
多关节机器人结构简图如图 1-4 所示,它是以其各相邻运动部件之间的相
对角位移作为坐标系的。θ、α 和 φ 为坐标系的坐标,其中 θ 是绕底座铅垂轴的
转角,φ 是过底座的水平线与第一臂之间的夹角,α 是第二臂相对于第一臂的
转角。这种机器人手臂可以达到球形体积内绝大部分位置,所能达到区域的形
状取决于两个臂的长度比例。其特点是:
(1)动作较灵活,工作空间大。
(2 关节驱动处容易密封防尘。
(3)工作条件要求低,可在水下等环境中工作。
(4) 适合于电动机驱动。
(5)运动难以想象和控制,计算量较大。
(6)不适于液压驱动。
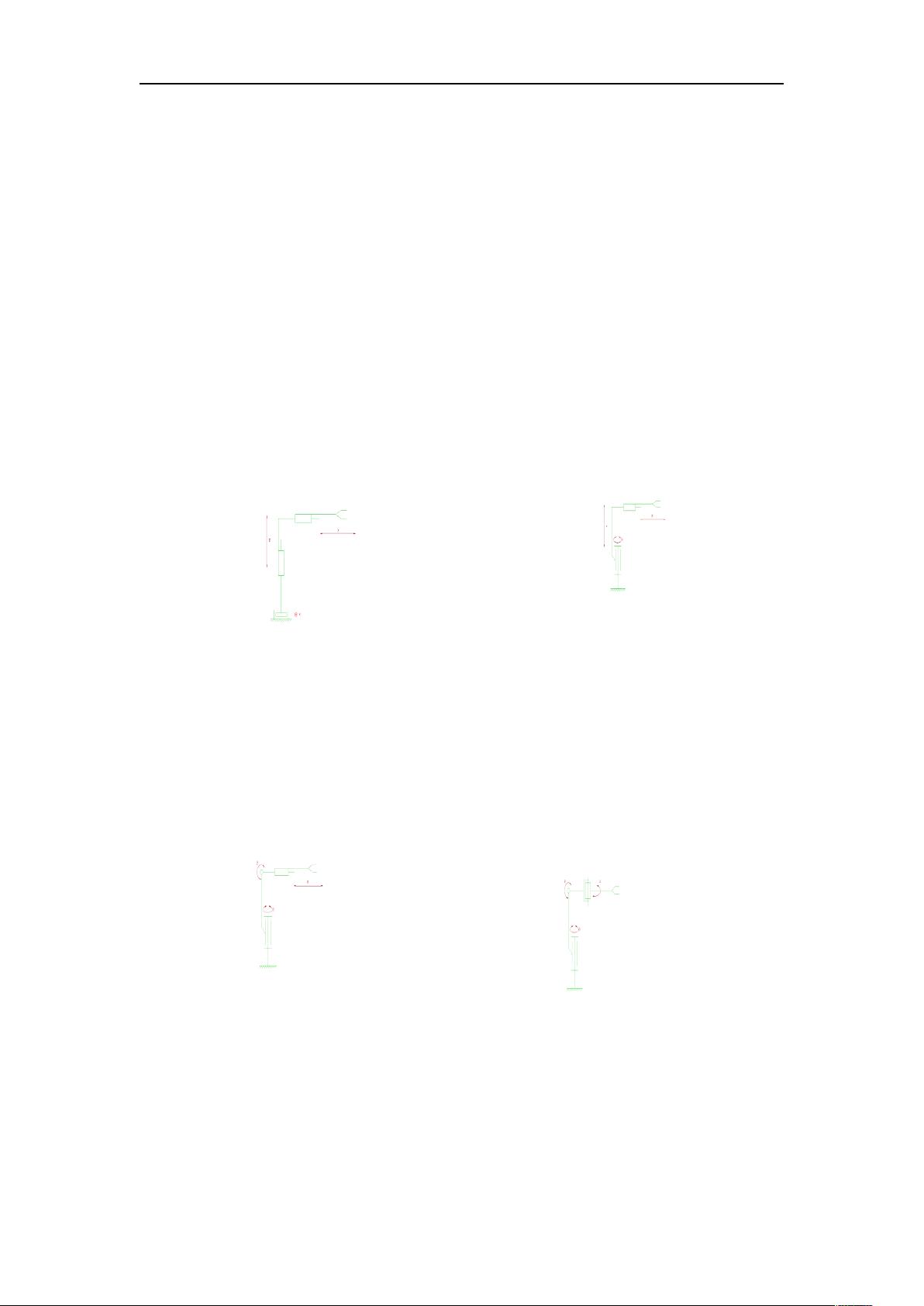
图 1-1 直角坐标型 图 1-2 圆柱坐标型
图 1-3 极坐标型 图 1-4 多关节型
选择方案的准则:
1.满足设设计要求:机械手能够旋转一定角度。
2.结构简单,便于计算分析。
分析比较以上四种运动形式,确定选用圆柱坐标型机器人。
剩余18页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-20 上传
476 浏览量
2022-06-20 上传
2022-12-03 上传
2023-06-21 上传
2023-06-21 上传

猫一样的女子245
- 粉丝: 231
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- UML( Unified Modeling Language)概述
- 网络工程师英语词汇表英语词汇表
- 信号与系统PPT(郑君里)
- Windows核心编程-第五版(中文版)完整
- spring框架,技术详解及使用指导
- java面试常见问题总结word版
- Flex3 in Action EN文经典推荐
- 掌握IIS排错技巧 让Web更好服务
- 全国软考网络工程师英语习题
- 路由器配置步骤与方法
- 十天学会ASP.NET教程
- Beginning-SQL-Server-2008-for-Developers-From-Novice-to-Professional
- C++ 设计新思维.pdf
- pro-wpf-in-c-2008-windows-presentation-foundation-with-net-3-5-second-edition
- SAP中文版AP操作手册.pdf
- 网络建设流程(PPT 、习题、综合布线)内容丰富!
