螺旋桨轴流风机吸附:玻璃清洁机器人设计
版权申诉
62 浏览量
更新于2024-06-23
收藏 3.7MB DOC 举报
"玻璃清洁机器人吸附机构设计"
玻璃清洁机器人是一种专为清洁高层建筑玻璃幕墙而设计的特殊机器人,它的出现极大地降低了人们在高危环境中进行清洁作业的风险,同时提升了清洗效率和经济效益。这类机器人通常配备有吸附装置,以便在垂直表面上稳定地移动并执行清洁任务。
在对现有的玻璃清洁机器人吸附方式进行分析时,我们发现它们主要有磁吸、真空吸附、履带抓握等方法。每种方式都有其优缺点,例如磁吸方式适用于钢结构建筑,但对非磁性材料如玻璃则无效;真空吸附则能广泛应用于各种表面,但需要强大的密封性和稳定的气源;履带抓握则依赖于表面纹理,可能在光滑的玻璃上无法提供足够的抓持力。
针对这些情况,本文提出了采用螺旋桨式轴流风机产生负压的吸附方式,这是一种经济且适应性强的解决方案。轴流风机能高效地产生负压,通过特制的吸附盘将机器人牢固地固定在玻璃表面上,同时由于其结构紧凑,能降低机器人的整体重量,有助于提升移动灵活性。
在设计过程中,我们强调了模块化的设计理念,使得机器人各部分可以灵活组装和拆卸,便于维护和升级。吸附机构的设计考虑了负压产生、压力分布、以及在不同环境条件下的稳定性。我们运用相关的工程理论,如流体力学、结构力学,以及设计软件(如ANSYS、SolidWorks或Pro/ENGINEER)进行参数计算和结构优化,确保吸附机构能在预期的工作条件下稳定工作。
在完成理论设计和参数计算后,我们使用三维建模软件Pro/ENGINEER构建了吸附机构及整个机器人的三维实体模型。这不仅有助于视觉上的验证,也有利于在实际制造前进行仿真分析和改进,确保设计的可行性。
关键词:玻璃清洁机器人、复合吸附方式、螺旋桨式轴流风机、模块化设计、三维实体模型
这个设计旨在创造一个高效、安全且经济的玻璃幕墙清洁解决方案,通过创新的吸附方式和模块化设计,有望推动清洁机器人技术的发展,进一步拓宽其在建筑维护和其他领域的应用。
吸附装置也都采用的多吸盘真空吸附。
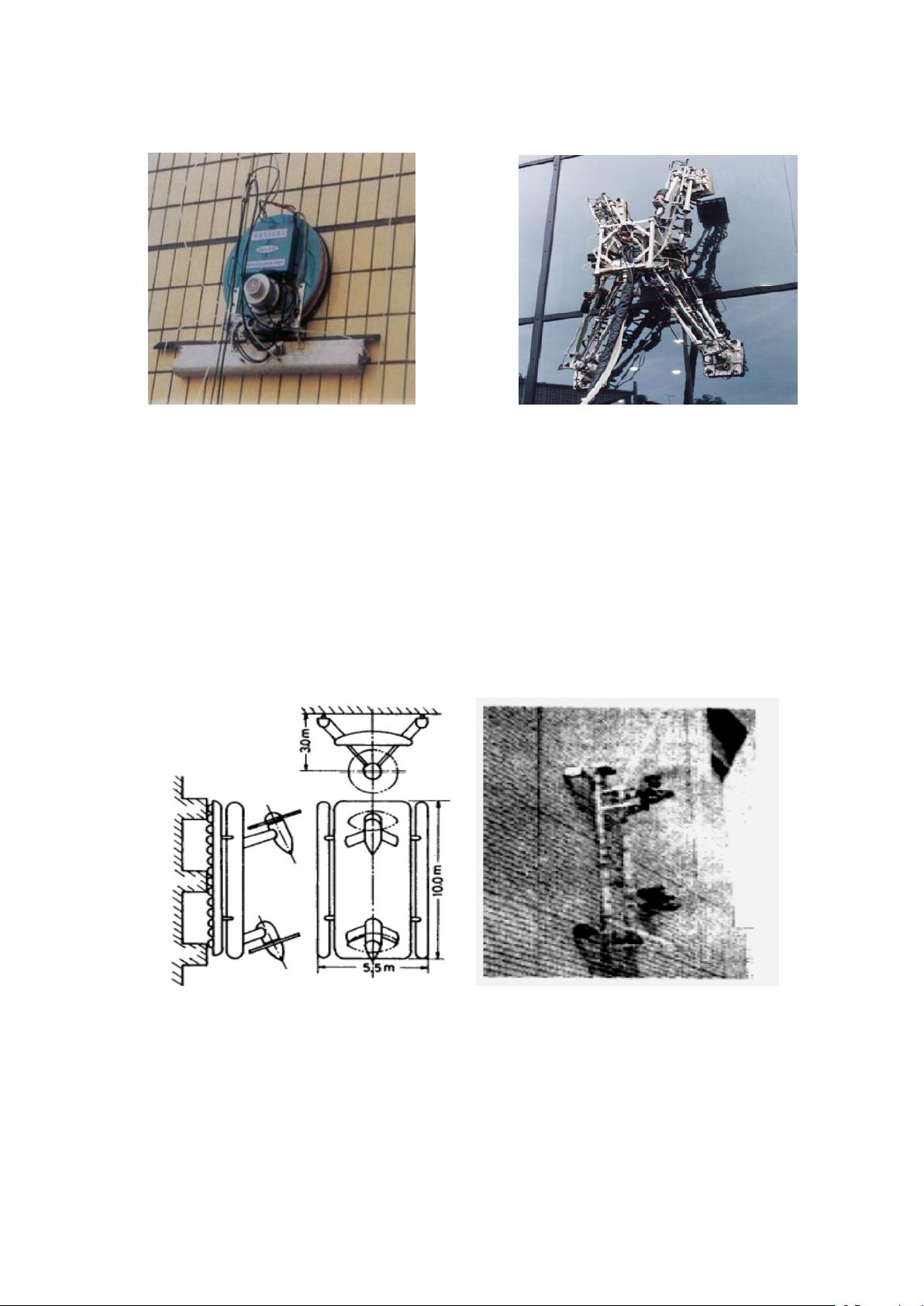
图 1.3 哈尔滨工业大学研制的 CLR-II 图 1.4 日本东京工业大学研制的 NINJIA
1990 年西亮教授研制的爬壁机器人的吸附装置采用的是推力吸附,如图 1.5 为理论设
计图。在吸附原理上它借鉴直升机原理,使用螺旋桨产生的高速气流推动机器人在墙壁表
面移动的同时贴合墙壁表面。螺旋桨的轴线与壁面大约成 200°夹角,如此高速气流产生
的推力在水平方向始终有分力指向壁面,从而实现了机器人的吸附吸附在建筑表面上:在
竖直方向也有向上的分力,使机器人可以紧贴壁面移动,且使机器人具有一定的越障能力。
掌舵机构控制机器人的移动方向和倾斜角度,由于使用柴油机,所以不需要带电源线,使
用起来很方便。图 1.6 为实物图。
图 1.5 螺旋桨式推力吸附壁面 图 1.6 螺旋桨式推力吸附壁面
移动机器人理论设计图 移动机器人实物图
1.3 吸附方式的发展趋势
经过上文分析阐述,并且结合当下机器人技术和科技前沿发展的总体趋势,我认为玻
璃清洁机器人作为具有特殊功能的壁面移动机器人,那么它吸附机构的也该顺应壁面移动
机器人吸附机构发展的如下趋势。
剩余33页未读,继续阅读
2023-07-11 上传
2023-07-15 上传
104 浏览量
2023-07-15 上传
155 浏览量
137 浏览量

omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
