合肥工业大学四自由度圆柱坐标机械手毕业设计详解与计算
版权申诉
本篇文档是关于合肥工业大学学生的四自由度圆柱坐标机械手毕业设计说明书。该设计旨在深入探讨和实践工业机械手技术在实际生产中的应用。首先,【绪论】部分介绍了工业机械手的基础概念,包括其定义、在制造业中的广泛应用,以及机械手的组成及其发展趋势。机械手作为一个关键的自动化设备,能够提高生产效率,减少人工干预,且随着技术进步,机械手正朝着智能化、灵活性和高精度方向发展。
【总体设计方案】部分明确了设计课题,详细列出了设计的要求和目标。设计者需要考虑如何结合四自由度(通常指旋转和平移)的圆柱坐标系统来构建机械手,以实现空间内的精确定位和操作。初期参数的设定和设计要求为后续计算和优化提供了基础。
【机械手手部设计计算】详述了手部的设计原则,如满足抓取和放置物体的力学性能,夹紧力和驱动力的计算确保了手部的稳定性和执行任务的能力。此外,还讨论了机械手手抓的夹持精度,这直接影响到生产过程的精确度。
【机械手腕部设计计算】部分着重于腕部结构的选择,包括如何根据设计要求选择适合的关节类型和材质,以及如何计算和承受手腕的回转力矩。这些设计决策对机械手的灵活性和稳定性至关重要。
【机械手臂部设计计算】涉及手臂的结构设计,包括典型机构的选择,手臂伸缩驱动力的计算,以及油缸的结构确定,确保手臂能准确地进行上下、左右移动。同时,油缸端盖的连接方式和强度计算也是保障手臂动作可靠性的关键。
【机身设计与计算】是整个机械手系统的重要组成部分,它涉及到机械手的承载能力、刚度和稳定性,以及如何将各部分有机整合,形成一个整体协调的工作平台。
这份毕业设计说明书详细展示了设计者如何通过理论分析和计算,结合实际工业需求,精心设计一款具有四自由度的圆柱坐标机械手,旨在提升生产过程中的自动化水平,提高生产效率和产品质量。通过阅读此文档,读者可以深入了解机械手的设计思路、关键技术以及实施步骤,对于相关领域的研究和实践具有很高的参考价值。
能机器人走出实验室进入实用化阶段。美国发射到火星上的“索杰纳”机器人就是这
种系统成功应用的最著名实例。
2 总体设计方案
2.1 设计题目:
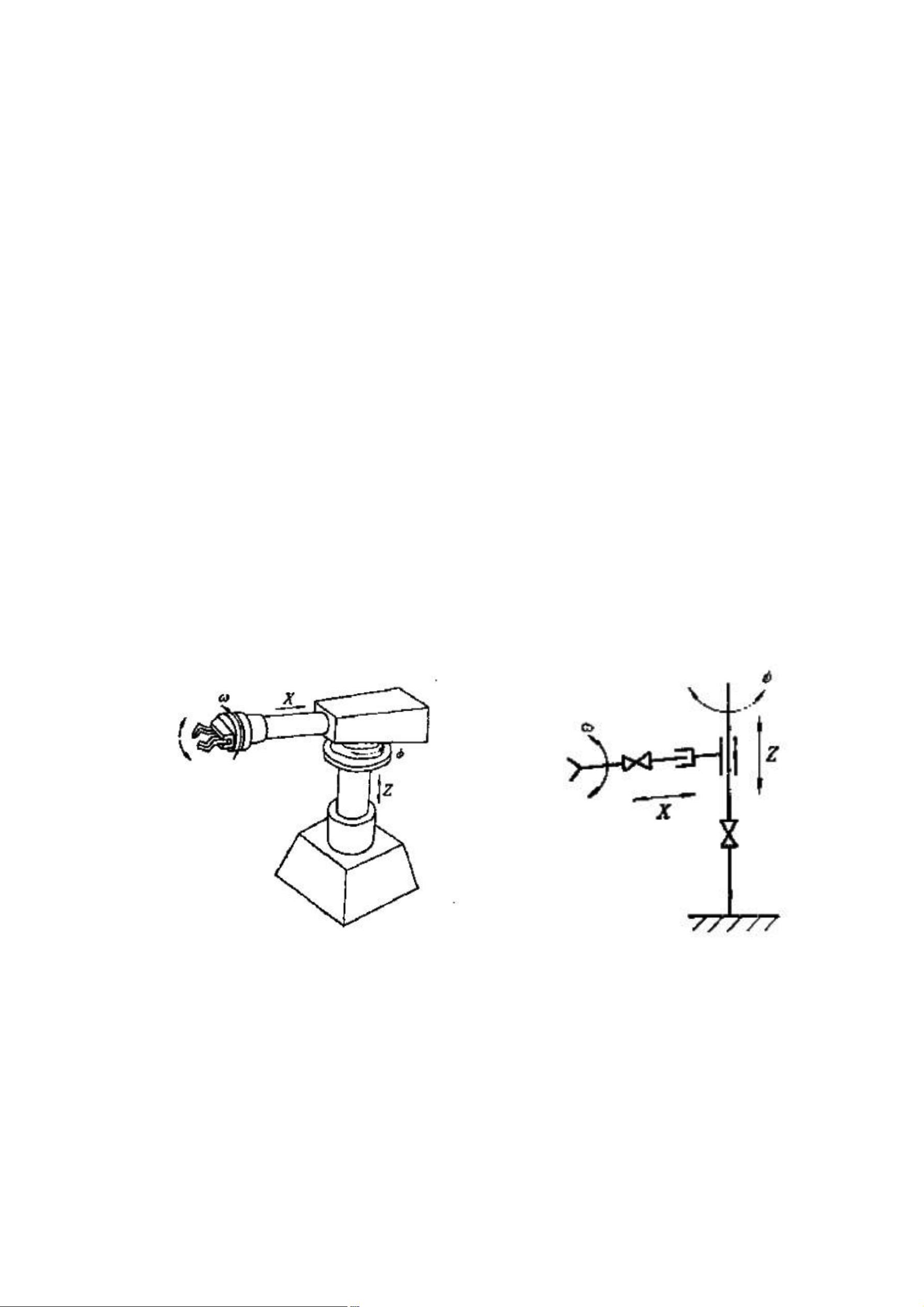
圆柱坐标式四自由度机械手设计
2.2 初始参数与设计要求
1、抓重:250N
2、自由度:4 个
3、臂部运动参数:
表 2-1
运动名称
伸缩
升降
回转
符号
X
Z
Φ
行程范围
0~500mm
0~330mm
0
º
~210
º
速度
<300mm/s
<60mm/s
<70
º
/s
4、腕部运动参数:
表 2-2
运动名称
回转
符号 行程范围
0
º
~180
º
速度
90
º
/s
5、手指夹持范围:棒料,Φ65mm~Φ85mm
6、定位方式:缓冲,死挡块定位
7、驱动方式:液压(中、低压系统)
8、定位精度:±3mm
2.3 方案拟定
4
剩余42页未读,继续阅读
2022-07-12 上传
154 浏览量
2022-07-12 上传
2021-09-16 上传
119 浏览量
176 浏览量
166 浏览量
135 浏览量
182 浏览量

xxpr_ybgg
- 粉丝: 6831
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
