MIT自适应控制律详解及Simulink仿真
需积分: 50 34 浏览量
更新于2024-09-04
6
收藏 531KB PDF 举报
"该文档详细阐述了基于MIT律的自适应模型参考自适应控制(MRAC)理论,并通过Simulink进行了仿真实验。主要内容包括两种类型的MIT律自适应控制器设计:可调增益的MRAC和多个可调参数的MRAC。提供了详细的Simulink仿真图以供学习和参考,同时也提供了联系方式获取仿真原文件。"
**一、自适应控制与模型参考自适应控制**
自适应控制是一种动态控制策略,旨在应对系统参数不确定性或未知性的问题。模型参考自适应控制(MRAC)是自适应控制的一个分支,它利用一个理想的参考模型来调整控制器参数,以使系统行为尽可能接近这个参考模型,从而实现对系统性能的优化。
**二、基于MIT律的可调增益MRAC设计**
MIT律(Modified Internal Model Principle)是MRAC的一种实现方式,它保证了控制器参数的更新方向总是沿着性能指标J的负梯度方向,以最小化误差。在MIT律的可调增益MRAC设计中,控制器的增益会根据系统误差和参数的导数进行实时调整。设计中,首先定义被控对象的传递函数G(s)和参考模型的传递函数m(s),然后构建控制器结构,使得系统误差e(t)能够快速收敛至零。
**三、控制律与系统稳定性**
MIT律控制律的关键在于控制参数的更新,它通过误差e(t)和系统灵敏度导数e'(t)来更新自适应系数γ。然而,单纯增大γ可能会牺牲系统的稳定性。为解决这一问题,MIT律引入了规范化方案,确保系统的稳定性不依赖于输入信号的幅值。
**四、基于MIT律的多个可调参数MRAC设计**
对于具有多个未知或时变参数的系统,MIT律同样适用。在这种情况下,每个参数都有对应的自适应控制律进行更新。例如,如果系统模型包含未知参数a和b,设计参考模型和控制器,使其结构匹配,并通过自适应律调整参数θ以减少误差。系统输出y的动态方程会涉及到这些可调参数,通过比较系统和参考模型的输出,可以推导出适当的控制律。
**五、Simulink仿真**
文档中提供了基于Simulink的仿真实验,这有助于直观理解MIT律自适应控制在实际应用中的效果。通过观察和分析仿真结果,可以验证控制策略的性能和稳定性。
总结来说,这篇文档深入讲解了MIT律在自适应控制中的应用,特别是如何设计和实现可调增益和多个可调参数的自适应控制器。通过Simulink仿真,读者能够更深入地理解和掌握这种控制策略,并可进一步探讨其在不同系统中的适用性和优化潜力。
一、实验原理
设参考模型输出和系统实际输出的误差为 e(广义误差),被控对象未知或
慢时变参数为 θ,控制的目标为调整控制器参数,使得 e(∞) = 0。引入性能指标
函数:
( )
2
1
2
J J e
==
为了使 J 取极小值,沿 J 的负梯度方向变更参数,即:
d J J e e
e
dt e
= = − = − = −
其中
e
为系统灵敏度导数,
为自适应系数。
(1)基于 MIT 律的可调增益 MRAC 设计
设被控对象
( )
p
k G s
其中 k
p
为增益,未知或慢时变;G(s)为已知的传递函数,且使稳定和最小相位的
则取参考模型为:
( )
m
k G s
式中,k
m
为已知的参考模型增益。
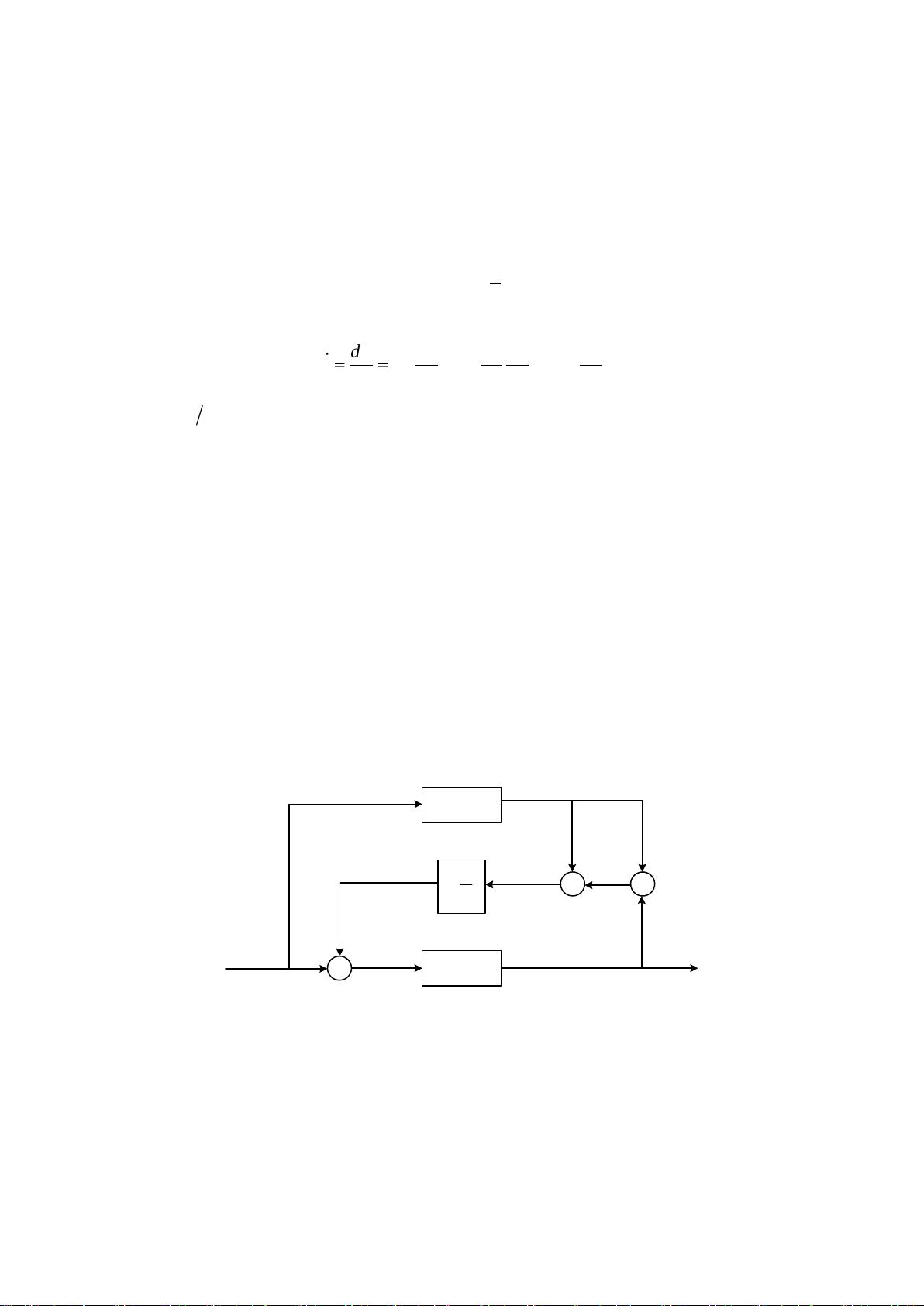
根据被控对象与参考模型结构相匹配的原则设计控制器,系统结构如图 1
所示。
k
0
G(s)
kG(s)
s
−
u
c
e
y
y
m
_
+
u
图 1 可调增益 MIT-MRAC 系统结构
系统的误差:
( ) ( )
0cc
e kG s u k G s u
=−
误差的变化率,即系统的灵敏度导数为
下载后可阅读完整内容,剩余7页未读,立即下载
173 浏览量
点击了解资源详情
点击了解资源详情
173 浏览量
2023-08-19 上传
356 浏览量
2021-09-28 上传
2021-08-14 上传

hit-lu
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
