点线特征鲁棒性评估的双目视觉里程计算法
需积分: 0 7 浏览量
更新于2024-08-05
收藏 2.28MB PDF 举报
"本文介绍了一种基于点线特征的双目视觉里程计方法,通过鲁棒性评估来提高位姿估计的精度。研究中,作者提出结合点线特征,利用梯度密度滤波器预处理和极线约束优化匹配过程,并引入综合考虑匹配精度和三角测量不确定性的特征选择策略。算法框架包括位姿估计、关键帧选取和局部建图,采用ORB和LSD/LBD描述子提取与匹配点线特征。实验结果在KITTI-ODOMETRY数据集上验证了该方法的有效性,与已有的PL-StVO算法相比具有优势。"
在自动驾驶、无人机控制以及太空机器人等领域,同步定位与地图构建(SLAM)技术至关重要。视觉SLAM是SLAM的一种形式,通常分为基于滤波器、关键帧优化和直接跟踪的三大类。视觉里程计作为视觉SLAM的前端,负责提供准确的相机位姿估计。基于点线特征的视觉里程计方法因其鲁棒性而被广泛研究。
传统的点线特征匹配方法往往忽视了匹配特征的差异性,将所有匹配视为等效。然而,匹配的特征点的视差大小直接影响三角测量的不确定性:大视差意味着更高的深度精度,但同时也增加了跟踪丢失和匹配不可靠的风险。因此,如何平衡匹配精度和三角测量的准确性成为一个挑战。
本文为此提出了一种新的特征鲁棒性估计方法,通过筛选出鲁棒性高的特征点和线段,结合ICP(迭代最近点)和PnP(透视n点)算法来估计相机位姿。在特征提取阶段,使用ORB提取特征点,LSD提取特征线段,并利用LBD描述子进行描述。线特征通过端点模型简化处理,同时应用极线约束提升匹配精度。通过分析KITTI数据集的双目图像,统计视差分布,进一步优化匹配过程。
算法框架包括三个主要部分:位姿估计、关键帧选取和局部建图。位姿估计是核心,通过优化匹配特征的鲁棒性来提高位姿估计的准确性。关键帧选取和局部建图则用于维持系统稳定性并构建环境地图。
实验结果表明,该方法在KITTI-ODOMETRY数据集上的性能优于PL-StVO算法,验证了所提方法的有效性和实用性。这一创新点线特征融合策略有助于提升双目视觉里程计在复杂环境下的鲁棒性和精度,为自动驾驶等领域的视觉导航提供了更可靠的技术支持。
142
计算机与多媒体技术
Computer And Multimedia Technology
电子技术与软件工程
Electronic Technology & Software Engineering
同步定位与地图构建(Simultaneous Localization and Mapping)
即 SLAM 技术,在自动驾驶、无人机控制以及太空机器人等自动
化领域应用广泛,主流的视觉 SLAM 大致分为三类:基于滤波器
[1]
、
基于关键帧优化
[2-4]
、基于直接跟踪的方法
[5-7]
。而作为视觉 SLAM
的前端视觉里程计,为后端估计出一个较为准确的位姿是其主要的
工作。
基于点线特征的视觉里程计
[8-10]
位姿估计的精度依赖点线特征
匹配的精度,传统综合特征的视觉里程计对提取出的特征匹配,采
用最小化 3D-3D 误差
[11]
或 3D-2D 误差
[9]
对方法对位姿进行估计。
这些方法把提取出的所有特征匹配的精度视为一致的,对这些匹配
的特征建立单一误差模型,求解相机的位姿。考虑到在双目立体匹
配中,由于匹配的特征点的视差越大,三角测量的不确定性越小,
估计出的特征点深度精度越高,但是视差越大的匹配点的深度越低,
在特征跟踪时容易丢失,且匹配的可靠性较差,这就形成了三角测
量精度与特征点匹配精度相矛盾的地方。
本文综合考虑匹配精度和三角测量精度,提出一种特征鲁棒性
估计方法,通过筛选鲁棒性高的特征点和特征线段,综合计算效率,
提出了一种结合了 ICP 和 PnP 方法估计位姿的点线双目视觉里程计,
并在 KITTI-ODOMETRY 公开数据集上通过与 PL-StVO
[9]
对比,验
证了本文算法的有效性。
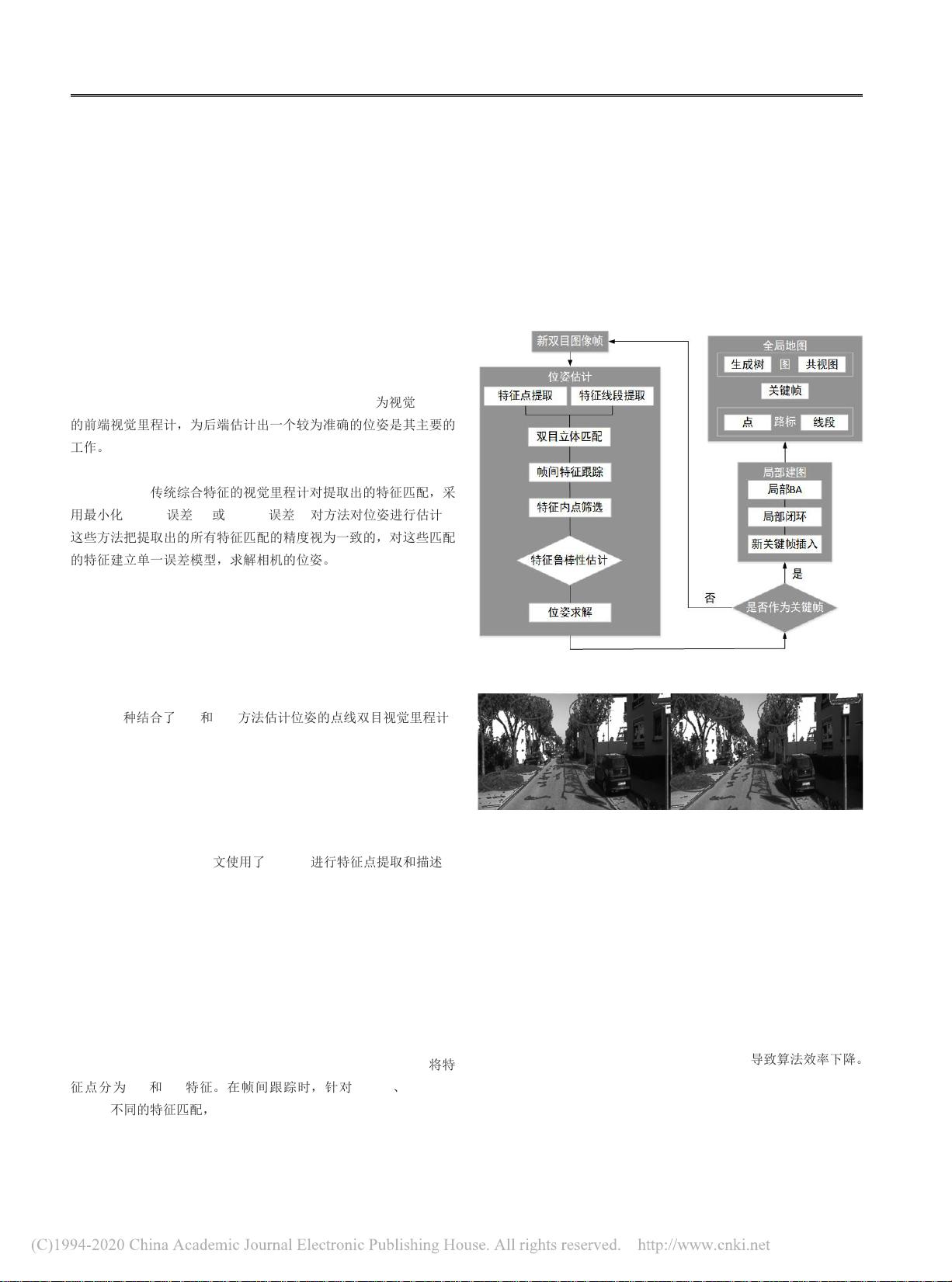
1 算法框架
本文视觉里程计算法框架如图 1 所示,分为位姿估计、关键帧
选取、局部建图三个部分。其中,位姿估计是本文的算法的核心工作。
特征提取过程中,本文使用了 ORB
[12]
进行特征点提取和描述,
LSD
[13]
进行特征线段提取并采用 LBD
[14]
描述子进行描述。通过对
提取的特征线段长度进行约束,过滤场景中大多数非结构化直线,
减少线特征描述子的计算成本,对特征线段采用端点模型表示,简
化特征线段的处理方式。并通过对特征点线进行极线约束,进一步
提高特征匹配的精度。通过对 KITTI 数据集
[15-16]
中双目图像对特
征匹配对的视差统计,结合双目视差对三角测量不确定性的影响,
对特征点进行鲁棒性评估,对三角测量精度高的特征点认为鲁棒
性较高,计算特征点深度,作为 3D 特征内点;对三角测量精度较
低的特征点,认为其三角测量误差较大,作为 2D 特征内点,将特
征点分为 3D 和 2D 特征。在帧间跟踪时,针对 3D-3D、3D-2D、
2D-2D 不同的特征匹配,提出了结合 ICP 和 PnP 方法的位姿估计方
法。最后进行选取信息冗余度低,位姿估计精度高的关键帧进行局
部地图优化。
基于点线特征鲁棒性评估的双目视觉里程计
荣燊
(合肥工业大学电子科学与应用物理学院 安徽省合肥市 230009)
2 双目视觉里程计
2.1 特征提取和匹配
由于 SLAM 系统的实时性要求,本文方法采用 ORB 方法对特
征点提取和描述,采用 LSD 方法对特征线段进行提取,采用 LBD
方法对特征线段描述。
LSD 特征提取是一种基于区域生长的线段提取算法,在提取时
会检测到许多细小的线段,如图 2 所示,这些线段数量庞大,而且
大多数非图像中的结构化线段,带有较大的不确定性,且对数量庞
大的线特征计算描述子会耗费更多的计算成本,导致算法效率下降。
本文首先通过对检测出的线特征几何长度进行约束,去除这些非结
构性线段。
算法流程如下:
(1)对图像首先采用梯度密度滤波器
[17]
进行预处理,剔除如
图 2.1 中所标识出来的密集区域,然后采用 LSD 算法进行线段提取;
摘 要:本文分别提取图像中的点线特征进行匹配,针对线特征提出先进行梯度密度滤波器预处理和极线约束再进行描述子匹配,提
出综合考虑特征匹配精度和三角测量的不确定性的特征鲁棒性评估策略,提出根据特征点线鲁棒性筛选效果结合 ICP 和 PnP 估计相机位姿
的方法,通过局部建图优化位姿。经过 KITTI 公开数据集的测试,验证了本文方法的有效性。
关键词:视觉里程计;双目视觉;点线特征;位姿估计;关键帧
图 2:在 KITTI_00 序列上使用 LSD 提取直线的结果
图 1:算法框架
下载后可阅读完整内容,剩余4页未读,立即下载
2022-08-03 上传
2021-09-30 上传
点击了解资源详情
2021-03-01 上传
2023-02-23 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

萌新小白爱学习
- 粉丝: 0
- 资源: 311
 我的内容管理
展开
我的内容管理
展开







最新资源
- dd39b51d2a9b1f1716981d125db7867a_python气象_气象_气象数据ERA5的下载教程_
- 【创新发文无忧】Matlab实现黏菌优化算法SMA-DELM的故障诊断算法研究.rar
- 基于l297_l298组合驱动步进电机DXP资料及其相关资料_51单片机(论文+开题报告+源代码+详解图).zip
- lang-mustache-client-6.3.0.jar中文-英文对照文档.zip
- PWM信号转与模拟量信号之间是如何转换的-综合文档
- flutter_emoji_keyboard:在flutter框架中仅用于表情符号的键盘
- nanovgXC:轻量级矢量图形库,在OpenGL中实现精确覆盖抗锯齿
- 行业分类-设备装置-大豆7S球蛋白(α+β)亚基缺失型种质的α-亚基基因的特异性序列片断.zip
- 程序_三维图_散斑_源码
- Python库 | arcade-1.0.1.post10-py2.py3-none-any.whl
- 【创新发文无忧】Matlab实现多元宇宙优化算法MVO-DELM的故障诊断算法研究.rar
- SlideTemplateApp:Slidey 样式的应用程序模板
- 基于java的-683-疫情防控期间某村外出务工人员信息管理系统--LW-源码.zip
- spring-data-commons-2.0.9.RELEASE.jar中文-英文对照文档.zip
- 人脸图像特征提取matlab代码-ICCICT_codes:使用基于面部对称的DCT融合进行特征提取以增强人脸识别
- kubegres-website:项目“ Kubegres”的网站
