微型扑翼飞行机器人研究进展与趋势
版权申诉
21 浏览量
更新于2024-06-29
收藏 857KB DOCX 举报
“基于聚类分析和运动描述语言的扑翼飞行机器人行为规划”
本文主要探讨的是扑翼飞行机器人,特别是基于聚类分析和运动描述语言的行为规划。扑翼飞行机器人是一种融合了微机电系统(MEMS)、能源动力技术和控制技术的高科技产品,其研究在上世纪末取得重大进展。这种机器人模拟自然界的鸟类或昆虫飞行,具有微型化、体积小、重量轻和长时间飞行的特点。
目前,美国在微型扑翼飞行机器人的研究中居世界领先地位,其中知名的实例包括AeroVironment公司的NanoHummingbird和哈佛大学的“机械苍蝇”。 NanoHummingbird翼展16cm,质量仅19g,且具备了多方向控制功能。而哈佛大学的“机器苍蝇”则更进一步,质量只有80mg,采用微加工的智能复合微型结构技术,具有出色的负载能力和飞行性能。
德国FESTO公司的SmartBird扑翼飞行机器人也是一个创新之作,外形酷似海鸥,使用碳纤维材料,具有高气动效率。另一方面,中国在微型仿生扑翼飞行器领域的研究相对较晚,但自2000年以来,清华大学、南京航空航天大学和西北工业大学等高校也开始进行相关研究,如曾理江对蜜蜂翅膀运动的研究,昂海松指导设计的导航飞行仿生机械鸟,以及刘斌和符冰研制的ASN-211扑翼飞行机器人,这些机器人不仅具备自主飞行和摄像功能,还适用于空中侦察和救援任务。
聚类分析在扑翼飞行机器人的行为规划中扮演重要角色,它能将复杂的飞行模式进行分类和理解,帮助机器人在不同环境中适应性地调整飞行策略。运动描述语言则提供了规范化的编程方式,使得飞行机器人的运动控制更为精确和灵活。通过这两种技术的结合,可以实现扑翼飞行机器人在复杂环境中的智能行为规划,提高其在实际应用中的效能和自主性。
总结起来,扑翼飞行机器人是一个集多种先进技术于一身的领域,涉及微系统技术、空气动力学、控制理论等多个科学领域。随着科技的进步,这类机器人在侦查、监测、环境研究等方面有着广阔的应用前景。同时,国内外的研究也在不断推动着这一技术的发展,以期创造出更加先进、适应性强的微型飞行器。
1.2.2 运动描述语言理论
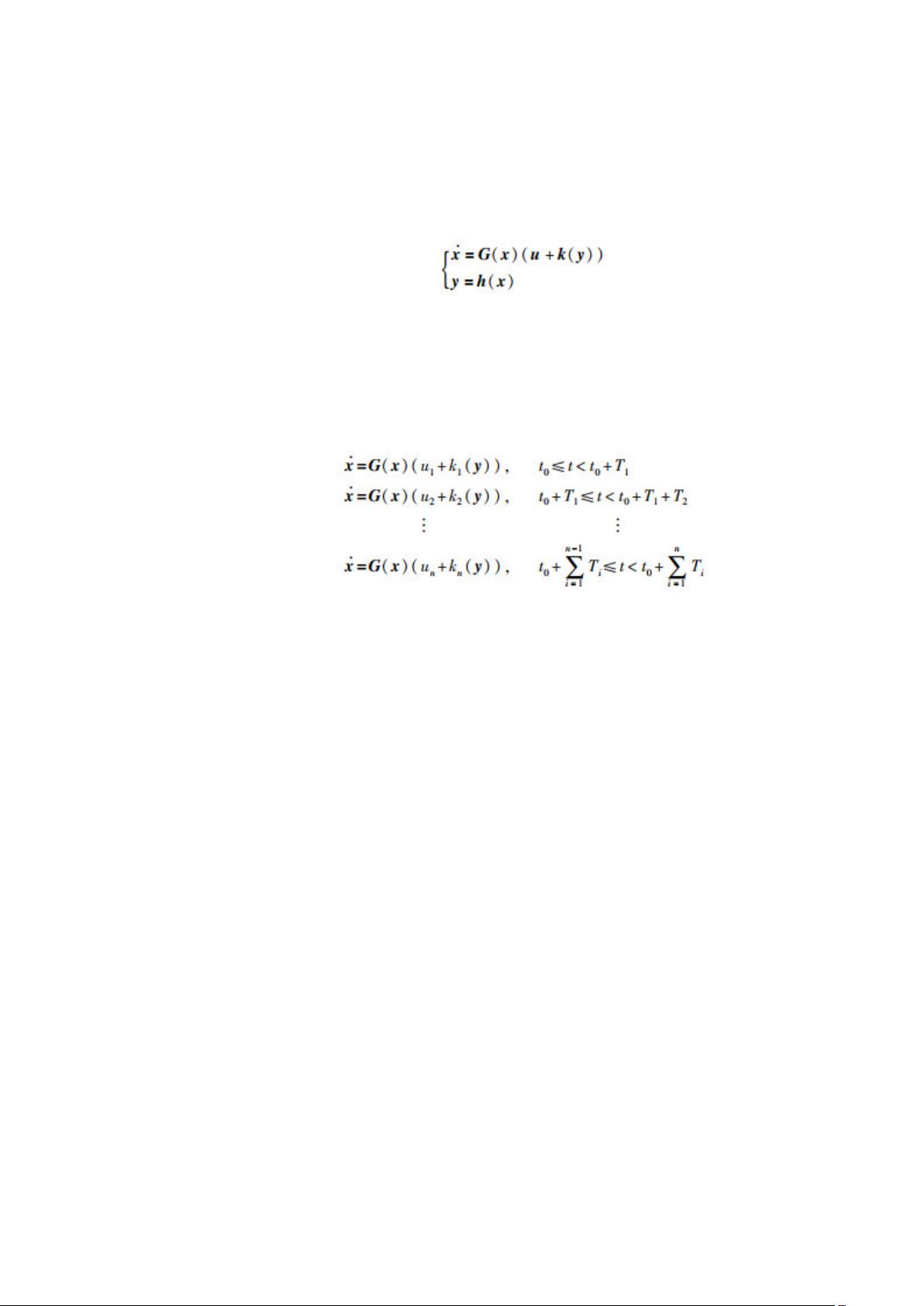
运动描述语言有其基本的物理模型,这种模型称为运动状态机. 运动状态机就是生成从状态空间到
输出空间的映射关系. 运动状态机模型定义为
(1)
其中,x,y 和 u 为时间变量的矢量函数,G 为矩阵,h 和 k 是矢量空间之间的映射. 三元组(u
i
,
k
i
,T
i
)称为“基元”,由这些三元组构成的集合称为“字母表”. 机器人控制程序表示为由字母表中的基元构成
的符号串的形式. 如果运动机的初始状态为 x
0
=x(t
0
),在接收到符号串(u
1
,k
1
,T
1
),(u
2
,k
2
,T
2
),…,
(u
n
,k
n
,T
n
)后,其运动规律可以描述为
(2)
其中,x,y 均是时间 t 的函数,u(i=1,2,…,n)是输入函数,u=(u
i
),x 是 n 维系统状态函数,y
是一个系统输出函数,k 是状态反馈向量, k=(k
i
).
在 MDL 理论中,整个控制系统可以被分解成许多小段,每一小段用一个三元组(u,k,t)来表示,
这个三元组被称为运动基元,其中 u=(u
i
)是控制率,k 是反馈状态向量,t 表示时间. 将一个连续系统分段
表示,然后将每一段用参数化的运动基元(u,k,t)表达,就可以用一串离散的符号序列来驱动一个连续系
统.
运动描述语言理论框架的控制系统结构如图 2 所示. MDL 字母表中的基元为三元组(u,k,t)的形
式,允许每个基元在一个任意长的时间段内执行. 在图 2 所示的系统结构中,机器人控制器可进行路径规
划和机器人的轨迹生成. 然后,通过 MDL 生成器生成运动描述语言序列. 随后,将运动描述语言控制序
列发送给 MDL 解析器,以控制机器人执行机构,完成机器人的规划和作业任务
[24]
.
剩余15页未读,继续阅读
2022-06-27 上传
2022-05-26 上传
2023-11-17 上传
2022-07-06 上传
2023-03-05 上传
2021-10-11 上传
2021-10-11 上传

罗伯特之技术屋
- 粉丝: 4415
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
