RBF神经网络结构优化:GGAP-RBF算法
需积分: 13 126 浏览量
更新于2024-09-08
收藏 505KB PDF 举报
"这篇论文提出了一种新的顺序学习算法,称为广义生长和修剪RBF(GGAP-RBF)神经网络,用于函数逼近。该算法首先引入了隐藏神经元的显著性概念,并将其应用于学习算法中,以实现简洁的网络结构。GGAP-RBF的生长和修剪策略基于将所需的学习精度与最近或故意添加的新神经元的显著性关联。神经元的显著性是其平均信息含量的度量。GGAP-RBF算法可以用于任何任意采样密度的训练样本,并从严格的统计角度推导得出。模拟结果显示,GGAP-RBF在函数逼近领域的基准问题上优于其他几种算法。"
RBF神经网络,全称径向基函数网络,是一种非线性模型,常用于函数逼近、分类和回归等任务。它的主要结构由输入层、隐藏层和输出层组成,其中隐藏层的神经元通常使用径向基函数作为激活函数,如高斯函数。这些函数具有中心化特性,能够根据输入距离决定其响应程度。
在RBF网络中,神经元的数量和分布对模型性能有很大影响。传统的RBF网络需要预先设定隐藏层神经元的数量,而GGAP-RBF算法解决了这一问题。它引入了"显著性"的概念,这允许网络在学习过程中动态调整其结构,即增加或减少神经元。显著性是衡量一个神经元对整体网络信息贡献的指标,反映了神经元的重要性。
生长策略基于新神经元的显著性和学习精度之间的关系。如果现有神经元无法满足所需的精度,算法会寻找最近的数据点或有意添加新的神经元,这些新神经元的显著性较高,能提高模型的表现。修剪策略则是在神经元显著性较低时,考虑移除它们,以避免过拟合并保持网络的简洁性。
GGAP-RBF算法的另一个优势在于它可以适应不同的训练样本采样密度。这意味着无论数据点如何分布,算法都能有效地构建和调整网络。这种灵活性使得GGAP-RBF在处理各种复杂问题时更具竞争力。
通过与其他算法的比较,GGAP-RBF在函数逼近的模拟实验中表现出色,表明其在实际应用中的潜力和有效性。这表明动态调整神经元数量的策略能够更好地捕捉数据的内在规律,从而提高预测或建模的准确性和泛化能力。
GGAP-RBF神经网络是一种自适应的RBF网络结构优化方法,通过引入神经元显著性来实现网络的动态生长和修剪,以适应不同问题的需求。这种方法不仅提高了模型的性能,还降低了过拟合的风险,对于函数逼近和其他机器学习任务具有很高的实用价值。
HUANG et al.: GENERALIZED GROWING AND PRUNING RBF (GGAP-RBF) 59
much smaller networks than SMO, and provides a comparable
generalization performance.
The rest of this paper is organized as follows. Section II in-
troduces the definition of significance of neurons and then gives
a simple estimation scheme for the significance. Section III de-
scribes the proposed “significance”-based generalized growing
and pruning RBF (GGAP-RBF) learning algorithm derived for
arbitrary input sampling density functions. Section IV presents
the performance comparison results for GGAP-RBF along with
RAN, RANEKF, and MRAN for two bench-mark problems, i.e.,
California Housing which is a real large-scale complex function
approximation problem and Mackey–Glass chaotic time series
prediction problem. Section V summarizes the conclusions from
this study.
II. D
EFINITION AND
ESTIMATION OF
SIGNIFICANCE
OF NEURONS
This section first introduces the notion of significance for the
hidden neurons based on their statistical average contribution
over all inputs seen so far, although those inputs are discarded
and not stored in the system after being learned.
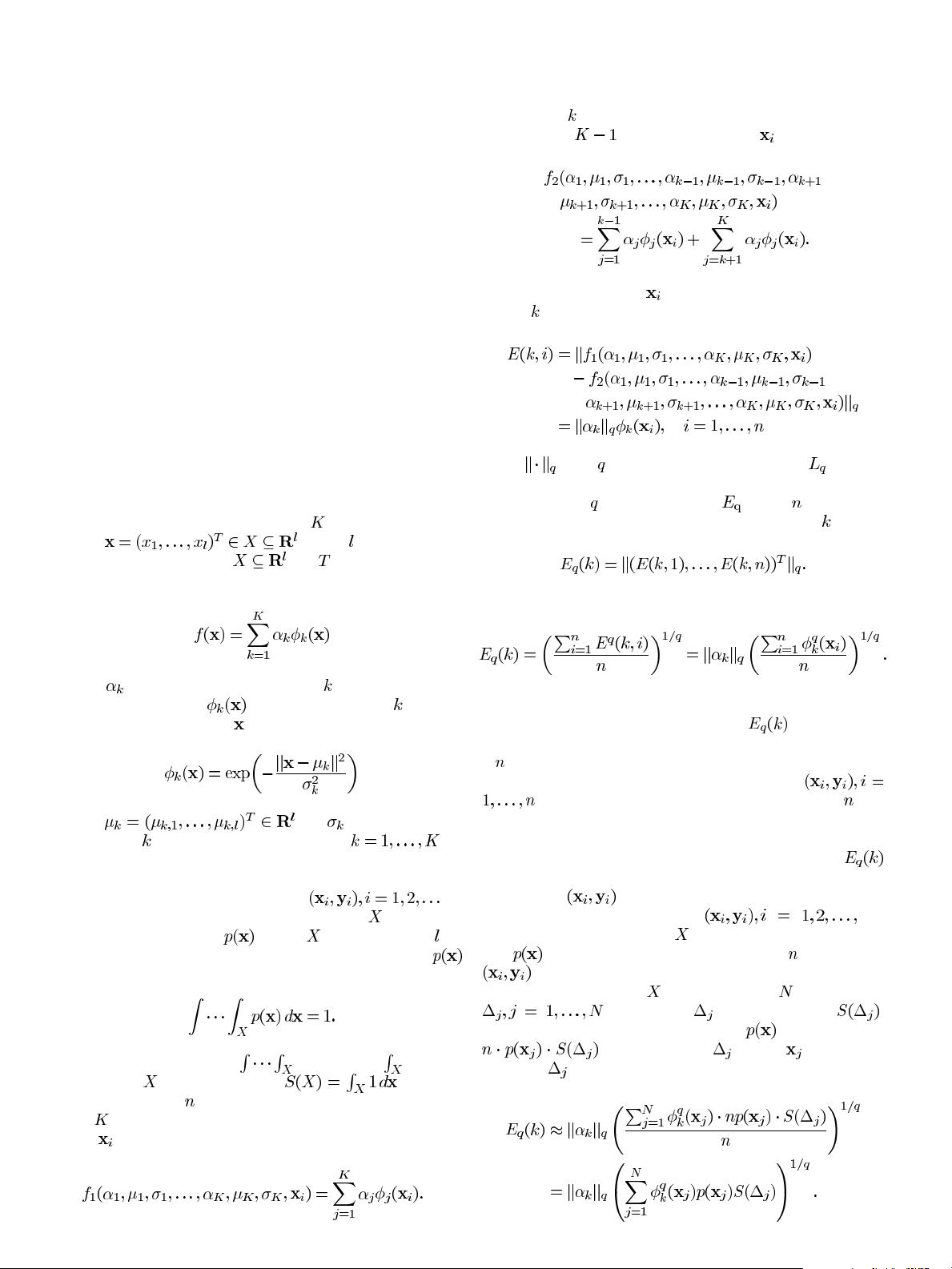
The output of a RBF network with
neurons for an input
vector
, where is the dimension
of input observation space
and means the transpose
of vectors, is given by
(1)
where
is the weight connecting the th hidden neuron to
the output neuron and
is the response of the th hidden
neuron for an input vector
(2)
where
and are the center and
width of the
th hidden neuron, respectively, .
In sequential learning, a series of training samples are ran-
domly drawn and presented to, and learned by the network one
by one. Let a series of training samples
,be
drawn sequentially and randomly from a range
with a sam-
pling density function of
, where is a subset of an -di-
mensional Euclidian space. The sampling density function
is defined as
(3)
For simplicity, in this paper,
is denoted by . The size
of the range
can be denoted by . After se-
quentially learning
observations, assume that a RBF network
with
neurons has been obtained. The network output for an
input
is given by
(4)
If the neuron
is removed, the output of the RBF network with
the remaining
neurons for the input is
(5)
Thus, for an observation
, the error resulted from removing
neuron
is given by
(6)
where
is the -norm of vectors, indicating the -distance
between two points in Euclidian space.
In theory, the
-norm of the error for all sequentially
learned observations caused by removing the neuron
is
(7)
This can be further written as
(8)
However, the computation complexity of
would be very
high if it were calculated based on all learned observations and
if
is large. On the other hand, in the sequential learning imple-
mentation after learning the training observations
, are no longer stored in the system and the value may
be unknown and not recorded either. In fact, there may pos-
sibly have some more observations to be input further. Thus,
there must be some simpler and better way to calculate
as stated in (8) without the prior knowledge of each specified
observations
.
Suppose that the observations
are
drawn from a sampling range
with a sampling density func-
tion
. Suppose that at an instant of time, observations
have been learned by the sequential learning system.
Let the sampling range
be divided into small spaces
. The size of is represented by .
Since the sampling density function is
there are about
samples in each , where is any point
chosen in
. From (8), we have
(9)
剩余10页未读,继续阅读
154 浏览量
180 浏览量
180 浏览量
点击了解资源详情
982 浏览量
2025-01-06 上传

weixin_43482641
- 粉丝: 0
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







