单片机控制的汽车倒车防撞系统设计与实现
版权申诉
137 浏览量
更新于2024-07-03
收藏 1002KB DOC 举报
"基于单片机的汽车倒车防撞系统设计"
基于单片机的汽车倒车防撞系统是一种智能安全装置,旨在利用超声波脉冲测距原理,帮助驾驶员在倒车时准确判断与后方障碍物的距离,防止碰撞事故的发生。该系统的核心是单片机STC89C52,它负责处理所有输入和输出信号,对超声波测距模块HC-SR04进行控制和数据解析。
超声波测距模块HC-SR04通过发射超声波脉冲,然后接收反射回来的信号来计算时间差,从而确定与障碍物之间的距离。这个过程依赖于声速和发射与接收之间的时间间隔。由于超声波在空气中的传播速度是已知的(大约343米/秒),所以可以通过计算时间差来精确测量距离,范围通常在2厘米到5米之间。
系统的工作流程是这样的:当车辆开始倒车时,单片机会周期性地向超声波传感器发送指令,启动测距过程。测得的距离数据会被实时更新并显示在数码管上,让驾驶员能直观地看到车尾与最近障碍物的间距。同时,用户还可以通过键盘设置一个安全距离,当实际距离小于这个设定值时,系统会触发蜂鸣器发出急促的警告声,提示驾驶员立即刹车。如果系统与车辆的制动系统集成,它甚至能在达到预设的极限距离时自动激活刹车,提供额外的安全保障。
在设计过程中,需要考虑方案的可行性和效率,比较不同设计方案的优缺点,并进行深入的分析和计算。这包括对单片机编程、超声波传感器特性的理解以及电路设计。例如,需要优化单片机的C语言程序,确保其高效运行,同时减少功耗。此外,还需要对超声波测距的误差进行分析和修正,以提高测距的精度和系统的可靠性。
为了完成这个项目,学生需要查阅大量专业资料,如《单片机应用系统设计技术》、《51系列单片机C程序设计与应用方案》等,了解和学习单片机编程和超声波测距的相关知识。在项目执行阶段,需按照时间表逐步进行,包括查阅资料、完成外文翻译、设计硬件电路、编写和调试软件、以及撰写和修改毕业设计论文,最后进行答辩,展示整个设计过程和成果。
整个系统的设计不仅需要理论知识,还需要实践操作能力,以及问题解决和创新思维。通过这样的设计,学生不仅能掌握单片机控制系统的设计方法,还能提升在实际工程中的应用能力。
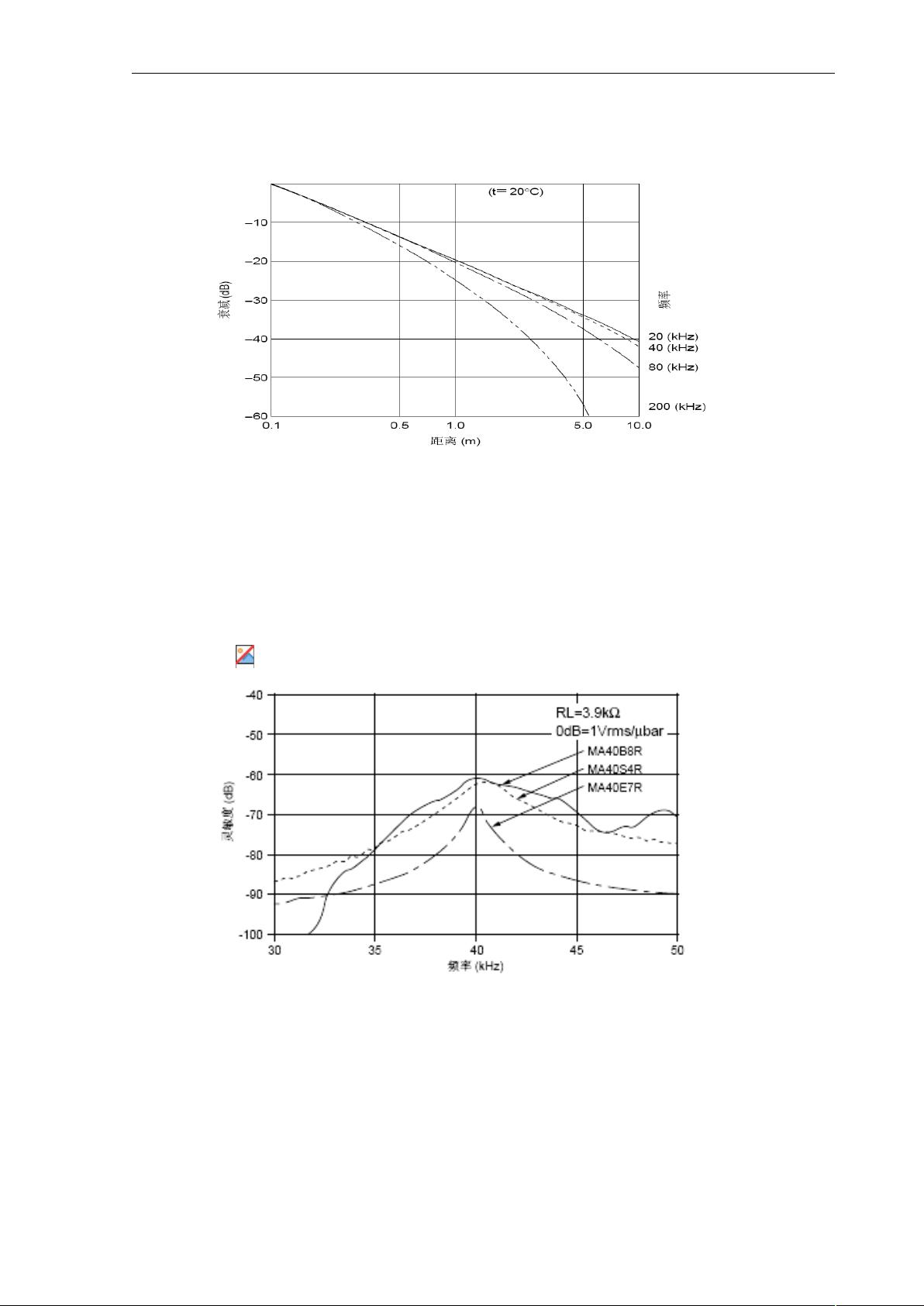
图 声压在不同距离下的衰减特性
.灵敏度特性
灵敏度是表示声音接收级的单位,下文论述了灵敏度计算的公式,并且讲述了灵敏度的标准和
性能。
灵敏度9-&$:=.1式中>?为所产生的电压 @,",“=?为输入声压A4/,。超声波测
距的准确性直接由超声波传感器的灵敏度影响,如图所示为几种中常见超声波传感器的灵敏度
特性表示,从图中可以发现传感器的声压级最高是频率在<7时,这提示我们应该充分利用
<7时所对应的测距数据,使其应用在焦虑最高处,所以本设计采用超声波测距模块发射了
<;的方波 。
图超声波传感器灵敏度示意图
.辐射特性
把超声波传感器安装在台面上。然后,测量角度与声压 灵敏度之间的关系。为了准确地表
达辐射,与前部相对比,声压 灵敏度级衰减.1的角度被称为半衰减角度,用二分之一B表示。
超声波设备的外表面尺寸较小容易获得较准确的测量数据。
分析以上研究结果不难发现超声波传感器在 <7 围工作时能够产生最高的声压级以与最高
的灵敏度。其辐射特性如图 所示。
3 / 45
剩余41页未读,继续阅读
2023-06-07 上传
2022-11-15 上传
2024-01-16 上传
2023-06-19 上传
2023-07-01 上传

智慧安全方案
- 粉丝: 3815
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB实现小波阈值去噪:Visushrink硬软算法对比
- 易语言实现画板图像缩放功能教程
- 大模型推荐系统: 优化算法与模型压缩技术
- Stancy: 静态文件驱动的简单RESTful API与前端框架集成
- 掌握Java全文搜索:深入Apache Lucene开源系统
- 19计应19田超的Python7-1试题整理
- 易语言实现多线程网络时间同步源码解析
- 人工智能大模型学习与实践指南
- 掌握Markdown:从基础到高级技巧解析
- JS-PizzaStore: JS应用程序模拟披萨递送服务
- CAMV开源XML编辑器:编辑、验证、设计及架构工具集
- 医学免疫学情景化自动生成考题系统
- 易语言实现多语言界面编程教程
- MATLAB实现16种回归算法在数据挖掘中的应用
- ***内容构建指南:深入HTML与LaTeX
- Python实现维基百科“历史上的今天”数据抓取教程
