六自由度焊接机器人设计及其技术发展
版权申诉
"六自由度焊接机器人设计.pdf"
焊接机器人,作为一种多用途、可重复编程的自动控制设备,具有显著的工业应用价值。六自由度的焊接机器人能够在三维空间内实现复杂路径的焊接作业,它的设计旨在提升焊接效率、质量和安全性。这种机器人的末轴法兰可以安装不同的焊接工具,如焊钳或焊枪,使其能够适应各种焊接和切割任务。
自1959年第一台工业机器人UNIMATE在美国问世以来,机器人技术经历了示教再现、感知能力和智能三个发展阶段。目前,国外如日本、美国、韩国等工业发达国家在机器人技术上取得了显著成就。关节型机器人成为主流机械结构,基于PC的开放控制系统被广泛应用,AC伺服驱动技术也在不断发展。同时,智能化传感器的集成使得焊接机器人具备更高的性能,朝着高速、高精度和多功能化方向演进。
在国内,中国已经掌握了机器人设计制造、控制系统软硬件设计以及运动学和轨迹规划技术,开发出弧焊、点焊、装配等多种类型的机器人。尽管如此,中国的工业机器人技术相对于国际先进水平仍有差距。当前的战略目标是创新研究基础技术、关键技术及系统技术,以满足21世纪初对先进制造和自动化技术的需求。
焊接机器人的研究与应用对于工业生产有着深远的意义。首先,它们可以显著提高焊接质量的稳定性和焊缝的一致性,确保产品的品质。其次,机器人取代人工焊接,极大地改善了工人的劳动条件,减少了高强度体力劳动,提高了工作安全性。此外,焊接机器人还能实现24小时连续作业,提升生产效率,降低生产成本,尤其在汽车、摩托车、工程机械等批量生产行业中,其应用价值尤为突出。
六自由度焊接机器人的设计与研发是现代工业自动化的重要组成部分,它标志着制造业的智能化水平,并对提升生产效率、保证产品质量以及优化劳动力配置等方面发挥着关键作用。随着技术的不断进步,未来焊接机器人将在更多领域得到广泛应用,推动工业4.0时代的深入发展。
毕业设计
2.2 自由度与关节
该焊接机器人采用关节型的机器人,具有六个自由度,即为二个腰关节、一个肩
关节、一个肘关节、还有二个腕关节。这些关节都为转动关节,在机器人本体末端还
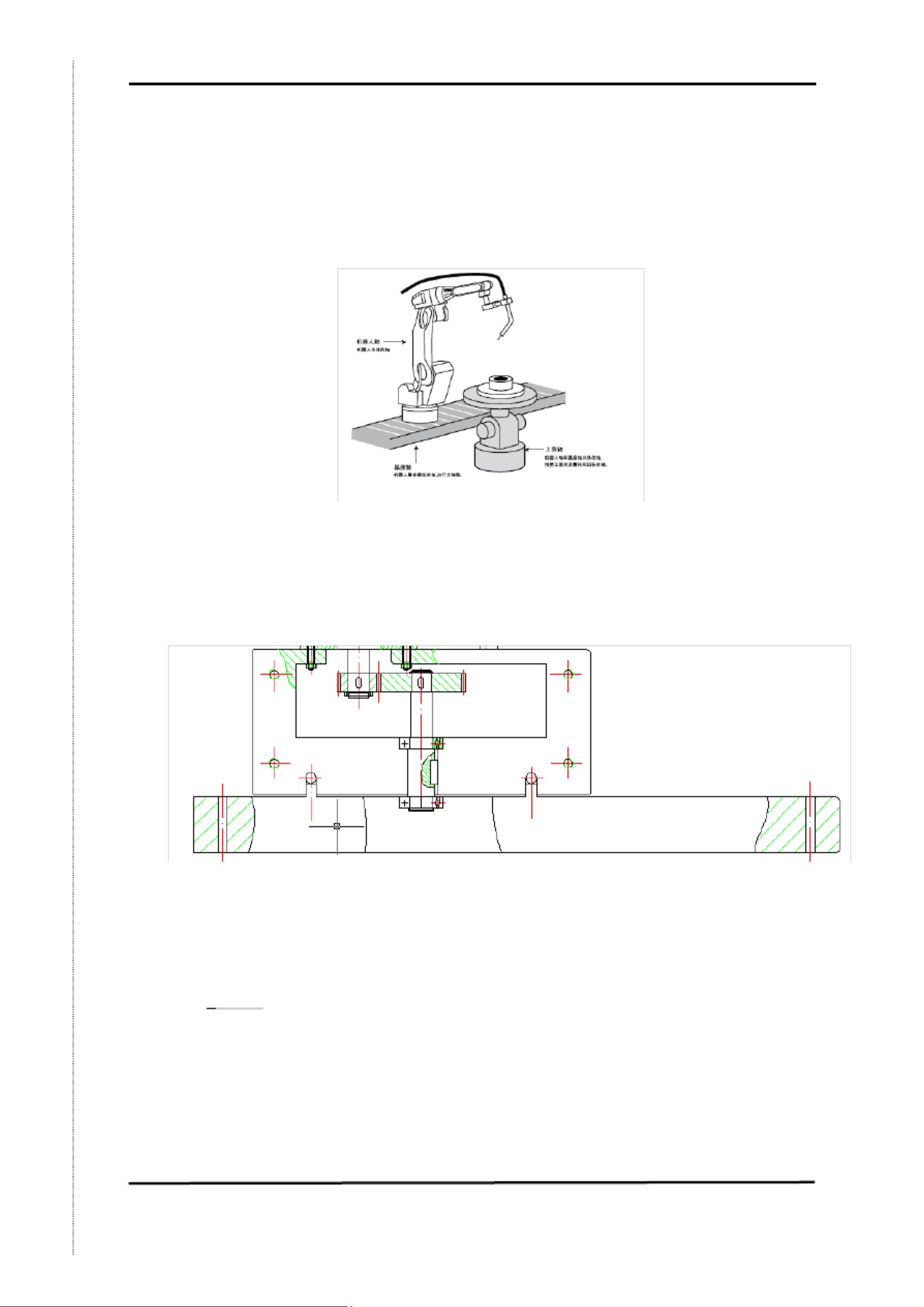
有一个用于加持物体的机械手。机器人本体的整体布局如图 2 所示。该整体布局图大
致反映了机器人的外形。
图 2.1 机器人本体整体布局图
2.2.1 基座的设计
(1)基座是整个机器人本体的支持,为了保证机器人的稳定性,基座设计如图
2.2 所示:
图 2.2 焊接机器人基座
此基座为带有转盘的基座,由于基座承受压力,为了充分利用材料的特性,选择
使用铸铁材料来制造基座,这样可以利用铸铁材料的吸振性,提高机器人的振动稳定
性。转盘上装有伺服电机,电机通过齿轮副传动,带动本体实线旋转运动,即 S 关节,
旋转角度+170°。在转盘上装有齿轮副架,实现齿轮副的合理安装,这样设计既可以
节约空间,又可以实现传到的要求。
基座上还设计有接线盒子,所有的电机驱动信号和反馈信号都是从这个接线盒子
中输入输出。
- 4 -
剩余17页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-11-13 上传
2021-07-25 上传
2022-07-12 上传
2021-09-26 上传
2021-09-21 上传

apple_51426592
- 粉丝: 9818
- 资源: 9653
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular程序高效加载与展示海量Excel数据技巧
- Argos客户端开发流程及Vue配置指南
- 基于源码的PHP Webshell审查工具介绍
- Mina任务部署Rpush教程与实践指南
- 密歇根大学主题新标签页壁纸与多功能扩展
- Golang编程入门:基础代码学习教程
- Aplysia吸引子分析MATLAB代码套件解读
- 程序性竞争问题解决实践指南
- lyra: Rust语言实现的特征提取POC功能
- Chrome扩展:NBA全明星新标签壁纸
- 探索通用Lisp用户空间文件系统clufs_0.7
- dheap: Haxe实现的高效D-ary堆算法
- 利用BladeRF实现简易VNA频率响应分析工具
- 深度解析Amazon SQS在C#中的应用实践
- 正义联盟计划管理系统:udemy-heroes-demo-09
- JavaScript语法jsonpointer替代实现介绍
