ROS生态:打造机器人产品化的关键资源库
82 浏览量
更新于2024-08-28
收藏 769KB PDF 举报
"浅谈ROS的产品化探索(四)——生态系统篇
ROS(Robot Operating System,机器人操作系统)的生态系统是一个由各种软件、硬件、开发者、研究者和用户组成的庞大网络,它旨在为机器人技术提供一个开放、标准化的开发环境。在这个系统中,各种机器人相关组件如传感器驱动、中间件、算法库和应用程序相互协作,共同推动机器人技术的发展。
一、ROS生态系统的核心组成部分
1. 开源社区:ROS的开源属性是其生态系统的基础,吸引了全球的开发者和研究者贡献代码、文档和资源,促进了技术的快速迭代和创新。
2. 工具链:ROS提供了全面的工具链,包括构建系统(catkin)、包管理(apt)、图形界面工具(rqt)、调试工具等,帮助开发者高效地进行开发和测试。
3. 功能包:ROS的功能包涵盖了从底层硬件接口到高层应用的各个方面,如导航、感知、控制、运动规划等,它们是ROS生态中的模块化组件,便于复用和扩展。
4. 硬件抽象层:ROS通过硬件抽象层实现了对多种传感器和执行器的支持,使得开发者能够轻松地在不同硬件平台上部署ROS系统。
5. 仿真环境:Gazebo作为ROS的主要仿真器,允许开发者在虚拟环境中测试机器人行为,减少实际硬件测试的成本。
二、ROS的机器人资源
ROS的机器人资源包括了各种类型的机器人平台,从服务机器人、无人机到移动机器人等,它们都为开发者提供了丰富的硬件参考设计和软件接口。这些资源不仅有助于硬件设计,还可以用于原型验证、算法测试和学习。
1. 硬件设计参考:开源的机器人模型为硬件设计提供了宝贵的经验,节省了从零开始设计的时间和成本。
2. 原型搭建与验证:ROS中的功能包可以帮助快速搭建功能原型,测试机器人的运动控制、感知等能力。
3. 二次开发:通过功能包的二次开发,开发者可以根据具体需求定制化机器人功能,提高产品的竞争力。
4. 算法验证与优化:ROS中的机器人模型和仿真环境为算法工程师提供了便利,无需实际机器人就可以进行算法验证和优化。
三、功能框架
ROS的功能框架覆盖了机器人系统的各个层面,包括:
1. 通信框架:ROS1的发布/订阅模型和参数服务器提供了一种有效的数据交换方式,尽管在产品化中可能存在挑战,但其设计理念仍值得借鉴。
2. 服务与动作库:ROS的服务允许异步请求和响应,而动作库则处理更复杂的、带有反馈的任务,这些设计对于实现高级功能至关重要。
3. 数据记录与回放:ROS的bag文件功能可以记录机器人运行过程中的数据,便于后期分析和调试。
4. 可视化工具:如rviz可以实时显示机器人状态和环境信息,为调试和演示提供了直观界面。
总结,ROS的生态系统为机器人产品化提供了强大的支持,它降低了开发门槛,加速了技术转化,同时也推动了整个行业的进步。随着ROS不断进化,未来将有更多创新涌现,进一步推动机器人技术的商业化进程。"
浅谈浅谈ROS的产品化探索(四)的产品化探索(四)——生态系统篇生态系统篇
什么是生态系统?
维基百科的解释是:生态系统(Ecosystem)是指在一个特定环境内,相互作用的所有生物和此环境的统称。
ROS提供了一个庞大的开源社区,为ROS生态系统提供了基础环境,众多机器人的基础工具和应用功能不断融入这个系统,
并且不断吸收第三方开源软件的精华,同时得到全球范围内众多开发者的支持,系统中的各部分协调统一、相互促进、共同成
长,成为一个整体。
这个ROS生态系统应该是目前最大的机器人知识库了,在机器人产品化开发中,也必将成为一个重要的资源池。
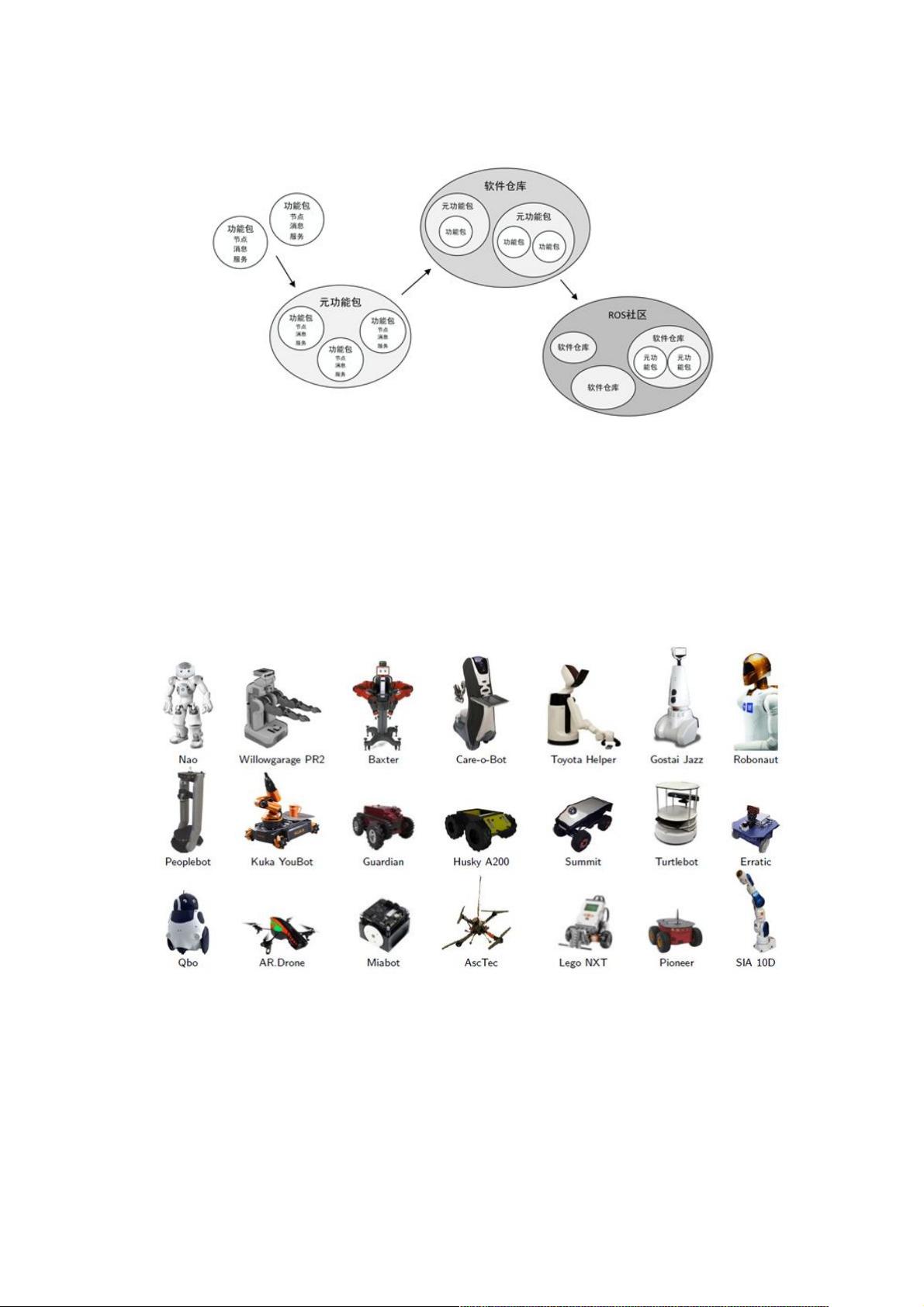
一、机器人资源
目前国内外常用的机器人平台大部分都已经支持ROS系统,可以在wiki上查找:
http://robots.ros.org/
就算wiki上找不到的,基本也可以在github上找到其他开发者的分享。如果加上爱好者自己设计、实现的机器人,那就更加数
不胜数了。
这些机器人资源对我们有什么用呢?
1. 机器人硬件设计参考
ROS中的机器人资源都是开源的,包括机器人的模型文件。如果我们需要做机器人设计,完全可以参考这些开源的机器人模
型,毕竟包含了不少知名的机器人平台。
2. 辅助机器人原型搭建
使用ROS中已有的功能包,我们可以在自己的机器人上快速搭建功能原型,验证机器人设计中的问题。
3. 基于应用功能包的二次开发
下载后可阅读完整内容,剩余6页未读,立即下载
223 浏览量
158 浏览量
178 浏览量
2442 浏览量
2024-06-03 上传
1477 浏览量
679 浏览量

weixin_38531017
- 粉丝: 8
- 资源: 915
 我的内容管理
展开
我的内容管理
展开







最新资源
- vue-tailwind
- ExcelMapsV2.7.12.0.rar
- 身份验证-Cookie-会话-Oauths-Google-Facebook-
- Ringfit2GoogleFit
- 自动化技术在电子信息工程设计中的应用研究 (1).rar
- microblog-master-nodeJS:microblog-master-nodeJS
- day1plus.zip
- libbgi.a、BIOS.H和graphics.h
- 快速键盘
- AlgorithmStudy
- 自动化码头作业区域人员进出安全管控.rar
- rn_flappy_bird
- deckor:交互式解码器
- 微信小程序canvas实现文字缩放
- Simple Click Counter-crx插件
- eWOW64Ext v1.1 - 加载任意 32/64 模块|64 位汇编及进程读写-易语言
