Robostar 2~4轴工业机器人操作与功能详解
需积分: 50 32 浏览量
更新于2024-09-07
1
收藏 221KB PDF 举报
Robostar 2~4轴工业机器人操作说明文档详细介绍了Robostar系列工业机器人的基本操作和功能特性。该机器人支持2至4轴配置,适用于各种工业生产环境中的自动化任务。操作说明主要包括以下几个核心部分:
1. **操作模式与控制**:
- CE TEACHING模式:这是一种教学模式,允许用户通过Teach Pendant(示教盒)直接引导机器人执行动作,进行编程和示教。
2. **Teach Pendant**:
- Teach Pendant液晶(LCD)显示屏幕提供了丰富的操作界面,包括指示灯(如ORG、SVON、SHFT、ALRM等),用于监控机器人状态和异常情况。
- 功能键允许用户选择不同的显示菜单,调整程序、监控I/O、设置运动速度和伺服状态,并查看扭矩值和制动状态。
3. **编程与编辑**:
- 编程时,用户可以在Job模式下分段输入命令,每屏最多显示4条,可通过方向键浏览其他命令。
- 支持edit模式,允许在程序修改过程中切换编辑和插入模式。
- 提供了紧急停止和断开电机电源的功能,以及Reset/Delete键用于清除错误和删除输入内容。
4. **导航与输入**:
- 方向键用于屏幕上的光标移动,以及在编程模式中浏览命令和变量。
- Enter键在输入数据时使用,根据不同模式有不同的功能,如参数模式下改变符号,Job模式下输入命令。
- Shift键作为多功能键,配合其他键可执行额外功能,如操作板上SHIFT LED指示灯的状态。
5. **点动与移动**:
- 点动键允许用户实时控制机器人沿箭头方向移动,而点位提取<CURR>画面则用于设置点动和连续移动的速度,并能监控电机速度和Z轴制动状态。
6. **辅助功能**:
- 提供翻页键(PgUp和PgDn)用于在点位提取画面中增加或减少点位编号,以及输入时的上下文切换。
- 文字键用于输入作业名称和命令语句中的变量和标记名。
这份操作说明文档对于理解和操作Robostar 2~4轴工业机器人至关重要,它详细阐述了机器人的操作流程、控制方式以及编程、监控和维护的各个方面,确保了用户能够高效、安全地进行设备操作。
Robostar
RobostarRobostar
Robostar
2~4
2~42~4
2~4轴
轴轴
轴(CE) TEACHING
(CE) TEACHING(CE) TEACHING
(CE) TEACHING
A. TEACH PENDANT
A. TEACH PENDANT A. TEACH PENDANT
A. TEACH PENDANT 说明
说明说明
说明
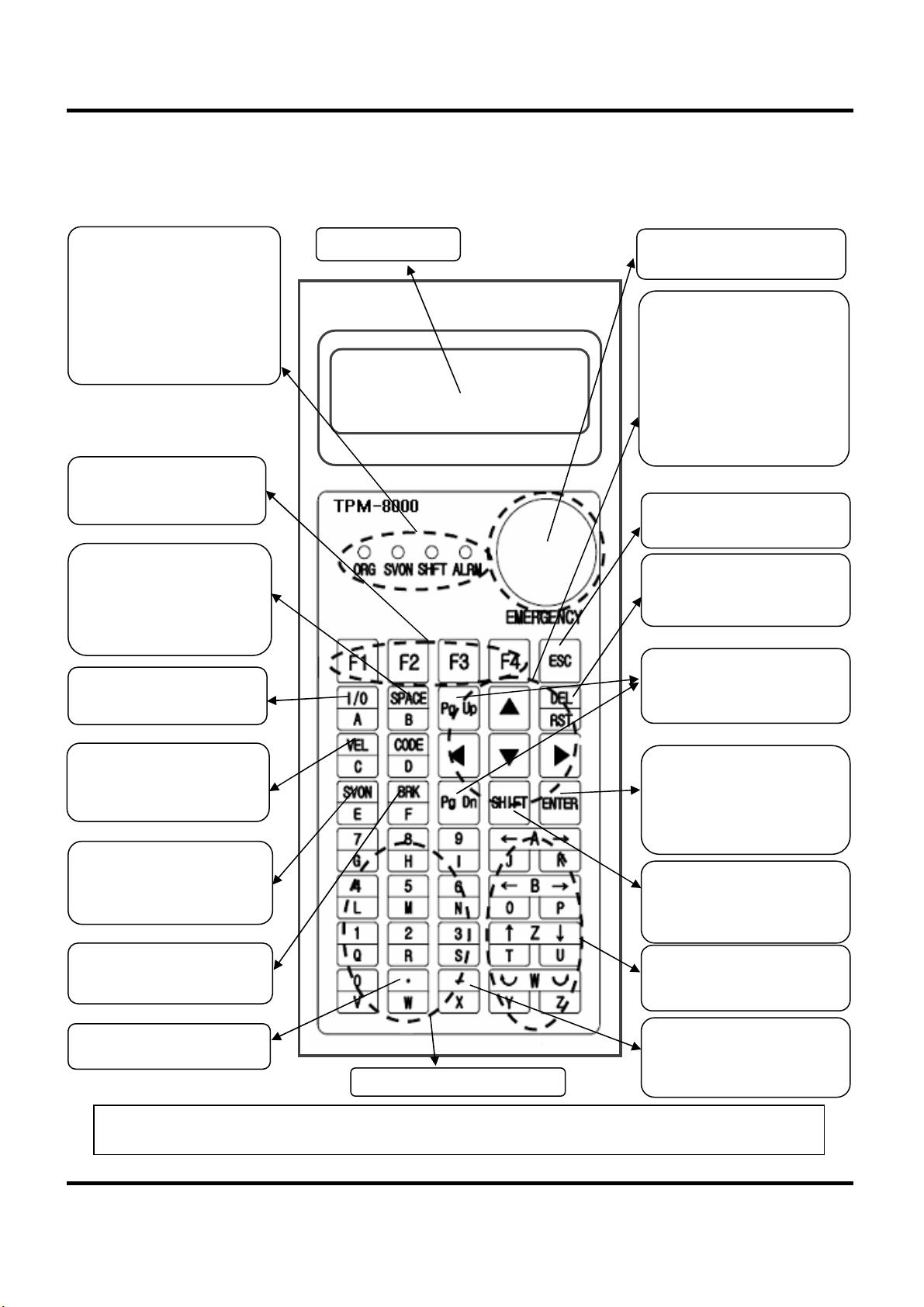
TEACH-PENDANT
TEACH-PENDANT TEACH-PENDANT
TEACH-PENDANT
液晶(LCD)显示画面
F1 F2 F3 F4
☞ 指示灯表示机器人的状态
ORG :原点复位完成时亮灯
SVON :按SVON键亮灯
SHFT :此灯亮时可以输入英文字母
ALRM :机器人有异常时亮灯
☞功能键(Function)
▷ 选择显示画面(LCD)的菜单。
▷ 运行中可以监控 I/O,内部接点。
☞ 修改,删除,移动程序时设定区间
。
☞ 点位提取<CURR>画面,选择点
动,连续移动键。
▷ 在点位提取<CURR>画面,可以设
定3阶段的速度。
▷ 运行中确认各轴的电机速度(rpm)。
▷ 在点位提取<CURR>画面,SERVO
ON/OFF。
☞ RUN 중 토크값을 모니터링
할 수 있음.
▷ 在点位提取<CURR>画面,把Z轴的
BRAKE ON/OFF。
☞ 프로그램 수정시 edit 모드로
변경 (e↔i)
☞ 紧急停止键,断开MOTOR电源.
☞方向键
- 画面上的光标按箭头方向移动。
- 按模式方向键的用法不同。
比如, 在JOB 模式编写程序时,
- 在一个画面只能显示4个命令语句,
需要查看其他语句时可以用方向键
查看。
☞ 退出键 (Escape)
- 退到以前状态模式时使用。
☞ RESET/删除键 (Reset/Delete)
▷ 解除报警状态。
▷ 删除输入错的文字,数字,命令。
☞ PgUp 键是向上翻页, PgDn键向下
翻页,
☞提取点位时利用翻页键可以增减
(Up/Down)点位的编号。
☞ Enter 键
▷ 用于输入所要的数据时。
▷ 根据模式用法不同。
比如,参数模式 → 每次按键符号改变,
JOB 模式 → 编写程序时用于命令输入
。
☞ Shift 键
▷ 用1个键完成2种功能时使用。
▷ 按Shift键如果操作板右上的 SHIFT
LED(指示灯)
☞ 点动键
▷ 按键则机器人按箭头方向移动。
11) 文字键
▷ 输入JOB名称或在命令语句中输入
变数名,标记名,副命令语句时使用。
9) 数字及符号键
☞ 其他功能
-, 同时按EMERGENCY 健和[F1]健 → 重新启动(RE-BOOTING).
1Page
1Page1Page
1Page
下载后可阅读完整内容,剩余8页未读,立即下载
2019-01-06 上传
2019-12-27 上传
2018-10-06 上传
2024-09-17 上传

weixin_38744153
- 粉丝: 346
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
