Ubuntu 16.04在VMware中安装并配置ROS教程
需积分: 40 100 浏览量
更新于2024-07-15
收藏 2.88MB PDF 举报
本篇文档详细介绍了在VMware虚拟机上安装Ubuntu 16.04 LTS(长期支持版)的步骤,以及如何在这个环境下安装和运行Robot Operating System(ROS)。以下是主要知识点的详细解读:
1. Ubuntu 安装:
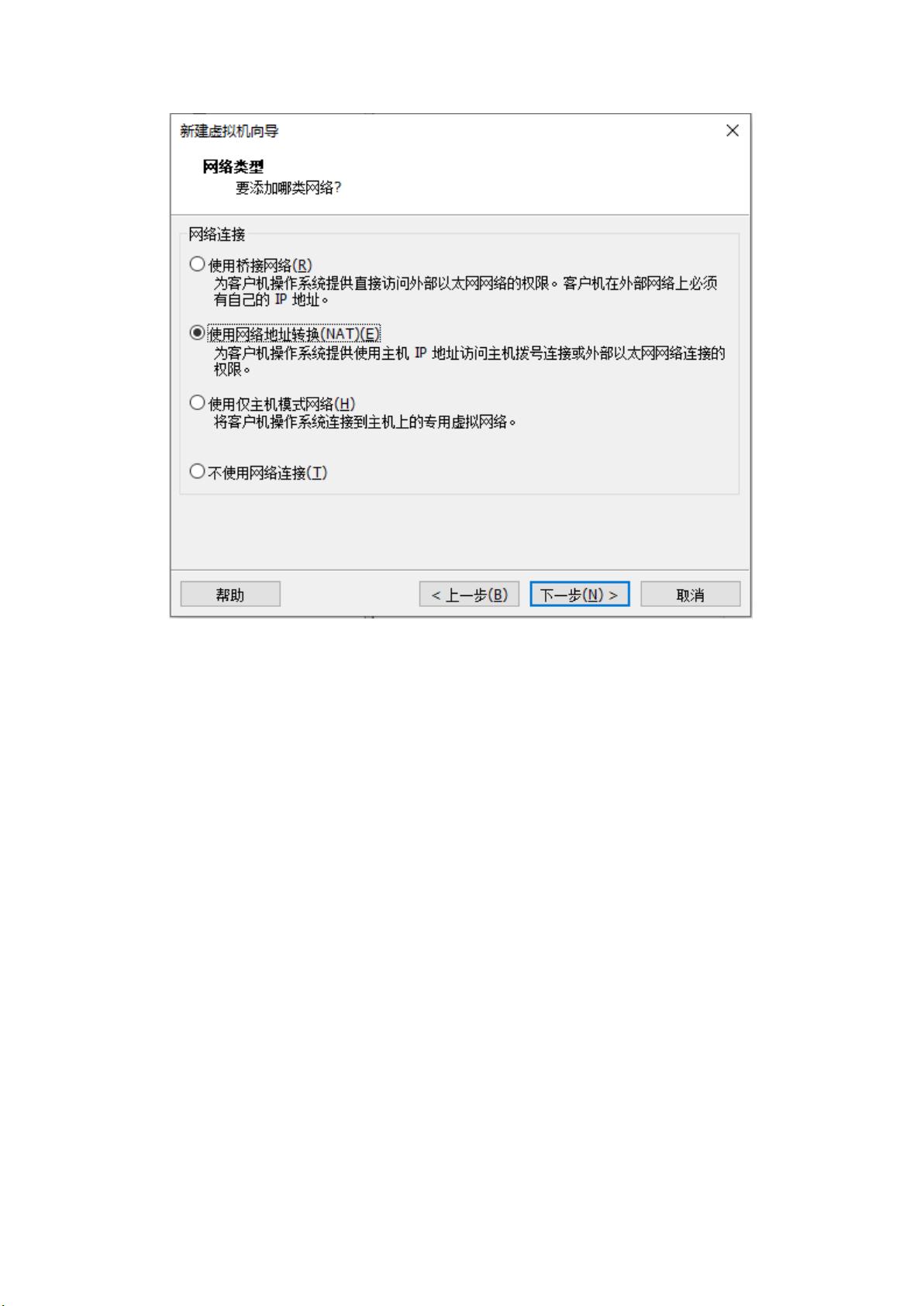
首先,用户需要准备Ubuntu 16.04.7 Desktop的64位镜像,可以从官方(https://releases.ubuntu.com/16.04/)或阿里云镜像源(http://mirrors.aliyun.com/ubuntu-releases/16.04/)下载。安装过程中,选择自定义安装模式,配置虚拟机硬件,如CPU核心数和内存,推荐至少2核2GB。安装方式选择NAT模式,安装过程中选择中文简体语言。
2. 安装步骤:
- 进入安装界面,选择“清除整个磁盘并安装Ubuntu”,确保磁盘空间充足。
- 设置时间和区域为中国上海,然后选择语言为汉语。
- 输入用户名和新密码,进行安装。如果遇到“su”认证失败,可以使用`sudopasswdroot`命令更新root密码。
- 安装完成后,重启虚拟机并使用新密码登录Ubuntu 16.04系统。
3. ROS 安装:
成功登录后,可以通过终端访问Ubuntu的命令行。首先解锁启动器中的终端选项,然后通过`su`命令以root权限登录。由于初次登录可能会遇到认证问题,此时需要输入新的密码以成功登录。
4. 系统配置:
在Ubuntu系统中,用户还需要设置其他必要的环境变量和配置ROS,包括但不限于安装ROS的软件包、设置环境路径、配置ROS的工作空间等。这通常涉及使用ROS的包管理器如`apt-get`或`aptitude`来安装所需的软件,以及配置ROS的核心组件如ROS Master。
5. 运行小海龟:
ROS的安装和配置完成后,用户可以利用ROS提供的各种工具和库来开发和运行机器人应用程序,例如控制小海龟(turtlebot)的移动和交互。这可能涉及到编写ROS节点(Node)、消息传递、传感器数据处理以及与其他节点的集成。
本文档提供了一个详尽的指南,帮助读者在Ubuntu 16.04系统上搭建ROS开发环境,并能顺利运行基础的机器人应用程序。这对于想要入门ROS或者在Ubuntu平台上进行机器人开发的用户来说是非常有价值的资源。
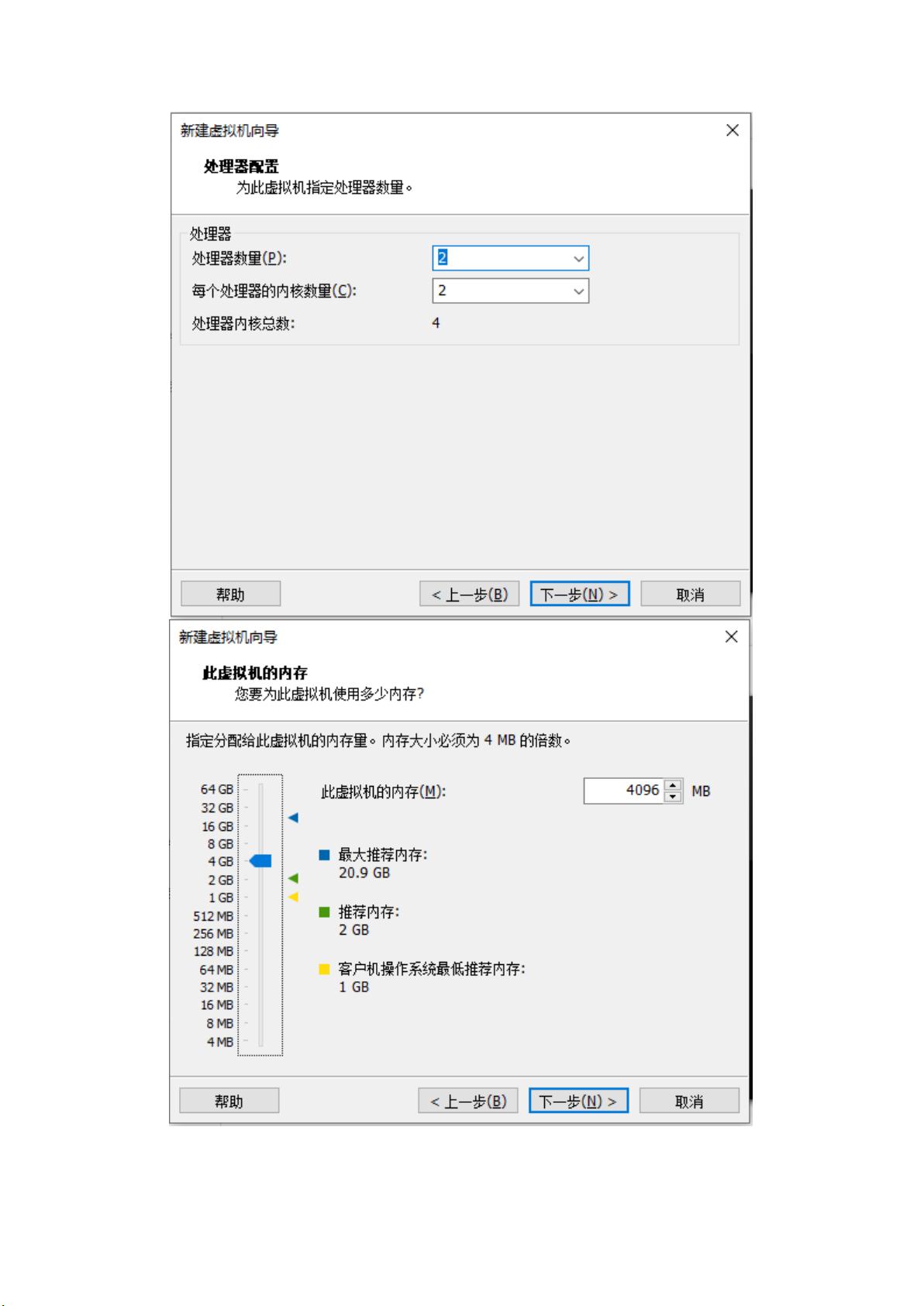
根据自己的电脑,选择相应的配置,建议不低于 2 核 2G 内存
剩余30页未读,继续阅读
2021-01-06 上传
2015-10-09 上传
2024-06-09 上传
2021-09-04 上传
2020-08-26 上传
2021-03-25 上传
2022-12-06 上传
2013-08-15 上传

细粒丁
- 粉丝: 66
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
