拍照赚钱任务定价深度解析:回归与优化模型应用
需积分: 0 106 浏览量
更新于2024-06-29
收藏 1.65MB PDF 举报
本文主要探讨了"拍照赚钱"任务的定价策略优化问题,通过四个关键部分深入分析和解决实际业务中的挑战。
第一部分,针对任务定价规律,作者构建了偏最小二乘回归模型。首先,通过K-means聚类算法将任务划分为不同的类别,然后基于这些类别,模型揭示了定价与地理位置、任务难度等因素之间的关系。研究发现,密集区域的任务定价相对较低,而偏远地区由于需求和供给的不平衡,定价较高。同时,模型还揭示了任务未完成的主要原因,如任务定价与市场需求不匹配,以及会员数量与任务分布的不均衡。
第二部分,为了处理已完成任务的重新定价问题,作者采用了单目标规划模型。模型中定义了会员的意愿度和期望价格函数,以任务完成率最大化为目标,对已结束任务的价格进行了调整。结果显示,对于未完成任务和偏远地区,价格有所提升,而完成度较高的密集区任务则适当降价,以促进任务完成率的提高。
第三部分,面对任务打包发布的定价修改问题,遗传模拟退火算法结合模糊C-均值聚类模型和多目标规划模型被引入。首先,通过遗传模拟退火算法对任务进行打包,考虑了商家成本和会员的接受程度。多目标规划模型旨在找到在成本控制和任务完成率之间的平衡。实验结果表明,最佳打包数量为280、220和260个,过少或过多的打包都会影响任务完成率。
最后一部分,文章提出了一种基于支持向量机的动态价格预测模型,用于实时调整定价策略。通过对任务进行聚类和打包后的数据分析,模型能根据市场变化预测价格,以优化定价方案的实施效果。定义了相应的评价指标来评估新方案的实施效果。
总结来说,本文通过一系列模型和方法,系统地解决了"拍照赚钱"任务定价中的各种复杂问题,旨在提高任务完成率、优化成本效益,并确保定价策略的动态适应性。这为其他在线任务平台提供了一个实用且科学的定价策略参考框架。
6
由图 2 可知,任务多分配于会员周围,多个任务的位置可能存在比较集中的现象,
导致会员争相选择;而有些任务数量多于会员数量或者周边会员距离任务位置较远而导
致部分任务无人完成的情况。且可以发现,任务的分布大多在会员密集程度较高的区域。
再次,对所给任务经纬度和其对应价格通过插值拟合的方法绘出其空间分布图,如
图 3 所示:
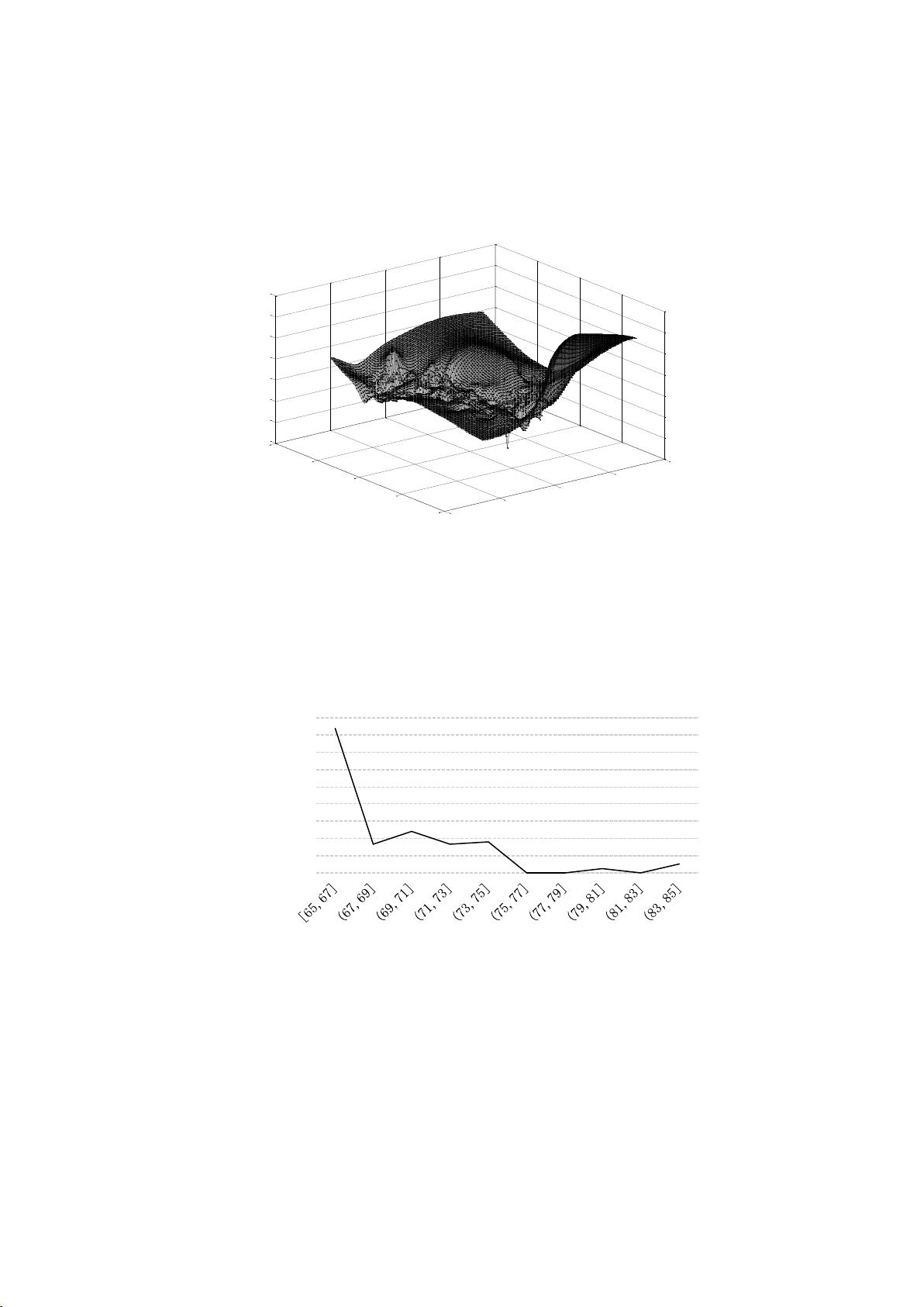
图 3 任务定价的空间分布
根据任务定价的空间分布图,可以看出其空间分布图的表面凹凸不平,即价格的高
低由于实际地理位置的不同而存在差异。分布图的边缘地带即实际地图中的偏远地区任
务的定价较高,其原因可能是由于发布任务所处的地理位置较偏远,会员人数较少,任
务的完成难度较高,因此需要利用较高的定价吸引会员来完成发布的任务。
最后,绘制定价区间与任务个数之间的关系示意图,如图 4 所示:
图 4 定价区间与任务个数的关系示意图
通过图 4 可以发现,当定价在区间内时,开发商发布的任务个数最多,总数
在 400 个以上,且与其他价格区间发布的任务个数悬殊极大;当处于区间(67,69]、(69,71]、
(71,73]、(73,75]时,各任务数量相差较小,都维持在 100 个左右;其他剩余区间分配的
任务数量极小,在 0个之间。由此可以大致推断出,区间可能为会员最愿意
接受的任务价格区间。
22
22.5
23
23.5
24
112.5
113
113.5
114
114.5
20
40
60
80
100
120
140
160
纬度/°N
经度/°E
任务标价
0
50
100
150
200
250
300
350
400
450
任务个数
/个
定价区间/元

剩余32页未读,继续阅读
101 浏览量
2025-04-02 上传
2025-04-02 上传
2025-04-02 上传
2025-04-02 上传
2025-04-02 上传
2025-04-02 上传
2025-04-02 上传
2025-04-02 上传

老许的花开
- 粉丝: 34
 我的内容管理
展开
我的内容管理
展开








最新资源
- 利用JavaScript从Sketch图像中提取调色板技术解析
- SSM框架整合实践案例分析
- 2021年3月9日HTML前沿技术分享
- 探讨自动化技术在机械设计制造的应用
- 欣世纪电子产品USBISP/ASP模块DM-USBISP驱动程序发布
- 易语言实现会员积分换购系统全攻略
- ListControl应用技巧与资料分享
- GraficoBrasileirao2020:展示巴西足球联赛队形图表工具
- C#基础入门:事件使用与语言基础教程
- C#实现从DBX到EML邮件文件格式的转换
- Python库graphscii:在命令行中绘制ASCII艺术图
- Android中TextView文字上下滚动效果的实现
- Windows 7下PHP5.2与Redis安装配置完全手册
- 实现EXCEL至PDF高效转换的方法
- 深入解析TCP/IP原理与网络互联架构
- 嵌入式智能自动化仪表的网络化应用研究
