KL30ECU的AUTOSAR网络管理需求规范翻译
需积分: 0 80 浏览量
更新于2024-06-27
收藏 185KB DOCX 举报
本资源是关于EEA-DRS-005-V15-AUTOSAR网络管理需求规范的V1.8版本,编译于2021年2月20日,文档英文原文翻译成中文。AUTOSAR是一个开放的系统架构标准,用于汽车电子控制单元(ECU)的软件开发。此文档的核心关注点在于定义了特定网络管理软件组件对于连接到CAN通信系统的KL30ECU的需求,并提供了一种通用的网络管理方法。
主要内容包括:
1. **需求规范**:文件明确了对网络管理软件的要求,强调了满足规范的重要性,并指出了处理与其他标准或规范冲突的优先级规则,如AUTOSAR标准、ECU特定要求和法律要求。
2. **范围**:规范仅适用于AUTOSAR高速CAN总线,不适用于其他类型的CAN总线,适用于网络管理的通用需求。
3. **术语和用法**:文件中使用了诸如“应”、“可选”和“可以”等关键词,分别表示强制性、选择性和允许的操作或方法。
4. **通信协议堆栈概述**:CAN架构被详细描述,展示了网络管理如何独立于硬件工作,负责协调网络操作和休眠模式切换,以及节点错误处理。
5. **网络管理概述**:KL30节点在点火开关关闭后仍需维持CAN总线通信,并要求所有通过网络连接的控制单元采用统一的NM协议。
6. **网络管理算法**:基于分散的直接网络管理策略,节点通过周期性NMPDU进行通信,保持网络活跃。节点会根据接收到的NMPDU决定是否进入休眠模式,避免不必要的休眠以保证通信需求。
7. **唤醒机制**:节点可以通过发送NMPDU将网络管理集群从休眠模式唤醒,以支持需要进行总线通信的情况。
这份文档提供了关于AUTOSAR网络管理的详细技术要求和操作流程,为KL30ECU的网络管理设计和实现提供了关键指导。对于从事汽车电子系统开发、尤其是与CAN总线通信相关工作的工程师来说,理解和遵循这些规范至关重要。
EEA-DRS-005-V15
3
应用程序层
数据链路层
我可以
吗
物理层
拉布勒
标题
版本
1.3
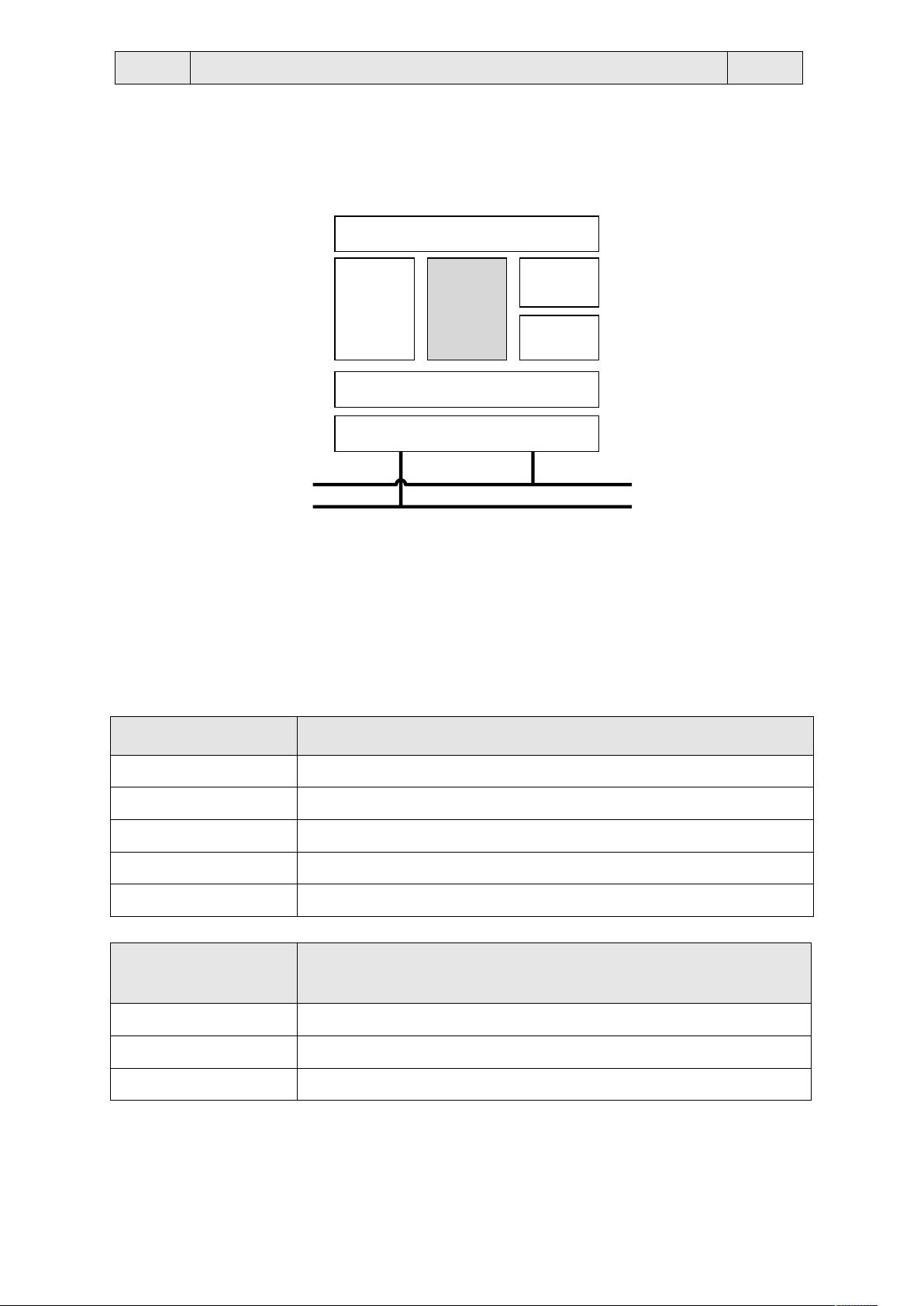
通信协议堆栈概述
CAN架构可见。图形 1
图1 CAN架构
CAN网络管理是一种独立于硬件的协议,只能在CAN上使用。其主要目的是协调网络的正常操作
和总线休眠模式之间的转换以及节点的错误处理。
网络管理层在以下章节中详细说明,该章节基于AUTOSAR NM状态图。
1.4
缩略语、首字母缩略词、定义和符号
释义
描述
KL 15级
激活节点的电源/控制信号
30克
永久性电源
电子控制单元
执行软件的电子控制单元
打开电源
KL 30重新连接。
节点
与本文档中的节点相同,参见ECU
缩写
。
代表
个人数据单元
协议数据单元
纳米
网络管理
厘米x
CAN矩阵
2
网络管理概述
本章定义了KL 30节点的网络管理要求。点火开关关闭后,KL30节点仍需要CAN总
线通信。
网络层
诊断的
层
网络
经营
相互作用
层
剩余16页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-05-13 上传
219 浏览量
2022-02-12 上传
2022-01-27 上传
2022-11-16 上传
2022-04-19 上传

天火流星
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- CVRNN:结合卷积和序列神经网络实现代码分类与相似搜索
- 基础嵌入式实验:LED流水灯的设计与实现
- pg_timetable:PostgreSQL作业调度新境界
- 易语言1.5#1版辅助调试库:提升调试效率
- 易语言日期调整功能源码实现详解
- 电影院Java项目:Cine-master的构建与实现
- 探索KeyPathKit:Swift中高效声明式数据操作
- 无人驾驶汽车专业化课程解析
- 三维寻路算法可视化工具:Dijkstra、A*与DFS深度演示
- Matlab开发实现DICOM文件的双卷读写功能
- Java Swing应用程序的exe打包及安装方法
- GitHub Classroom 实现的 CRUD 功能及数据导入导出教程
- 掌握vb.net实现Excel读写的核心类
- MC322资料库:JupyterNotebook在数据处理中的应用
- 亚马逊商店命令行工具使用指南
- Github Pages上的消费者数据权利注册平台
