浙大机器人课程:自主移动机器人导论
需积分: 41 136 浏览量
更新于2024-07-19
收藏 5.96MB PDF 举报
"移动机器人简介——浙大机器人课程讲义"
移动机器人是现代机器人学中的一个重要分支,它涉及多领域的交叉知识,包括机器人控制、传感器技术、定位与导航、路径规划以及人工智能等。本讲义来自浙江大学的机器人课程,旨在为学生提供全面的移动机器人理论与实践知识。
在移动机器人的研究中,SLAM(Simultaneous Localization and Mapping,同时定位与建图)是一项核心技术。讲义中提到的"SLAM"部分,讲述了机器人如何在未知环境中构建地图的同时确定自身位置。这通常涉及到激光雷达或视觉传感器的数据处理,通过概率模型如扩展卡尔曼滤波(EKF)或粒子滤波实现。例如,EKF在4-9)中被提及,用于移动机器人的状态估计,确保其能够准确地跟踪自身位置。
移动机器人需要多种传感器来感知环境,如超声波、红外、激光雷达(LIDAR)和摄像头等。这些传感器数据的融合是确保机器人能够理解周围环境的关键。讲义中提到了"3-7)"和"3-14)"等内容,可能涉及传感器数据的融合算法和策略。
路径规划是移动机器人的重要组成部分,确保机器人能够在环境中安全高效地移动。这部分可能涵盖了不同的规划算法,如A*算法、Dijkstra算法或者基于潜在场的规划。"3-21)"可能涉及到了某种特定的路径规划方法,比如基于网格的规划。
此外,讲义还提到了"4-4)"和"4-9)",这些可能与机器人控制系统的实现有关,包括运动控制和反馈控制,可能涉及PID控制器或其他高级控制策略,使得机器人能够精确地执行任务。
移动机器人的应用广泛,包括工业机器人、个人交互机器人以及服务机器人等领域。"Industrial Robotics"、"Mobile Robotics"、"Personal Interactive Robotics"以及"Manufacturing Applications"都是这一领域的重要方向。讲义中还提到了 ROS (Robot Operating System),这是一个开放源代码框架,常用于构建复杂的机器人系统,它支持跨多个平台的软件开发,并提供了丰富的工具和库。
最后,讲义引用了Roland Siegwart、Illah R. Nourbakhsh等人编著的《自主移动机器人》一书,这是一本关于移动机器人学的经典著作,对于深入理解该领域具有很高的参考价值。同时,还给出了相关的在线资源链接,如http://person.zju.edu.cn/0097062/715841.html,这可能是进一步学习和研究移动机器人的资料来源。
这份讲义覆盖了移动机器人技术的多个核心主题,对于希望深入理解移动机器人学的读者来说,是一份非常有价值的参考资料。
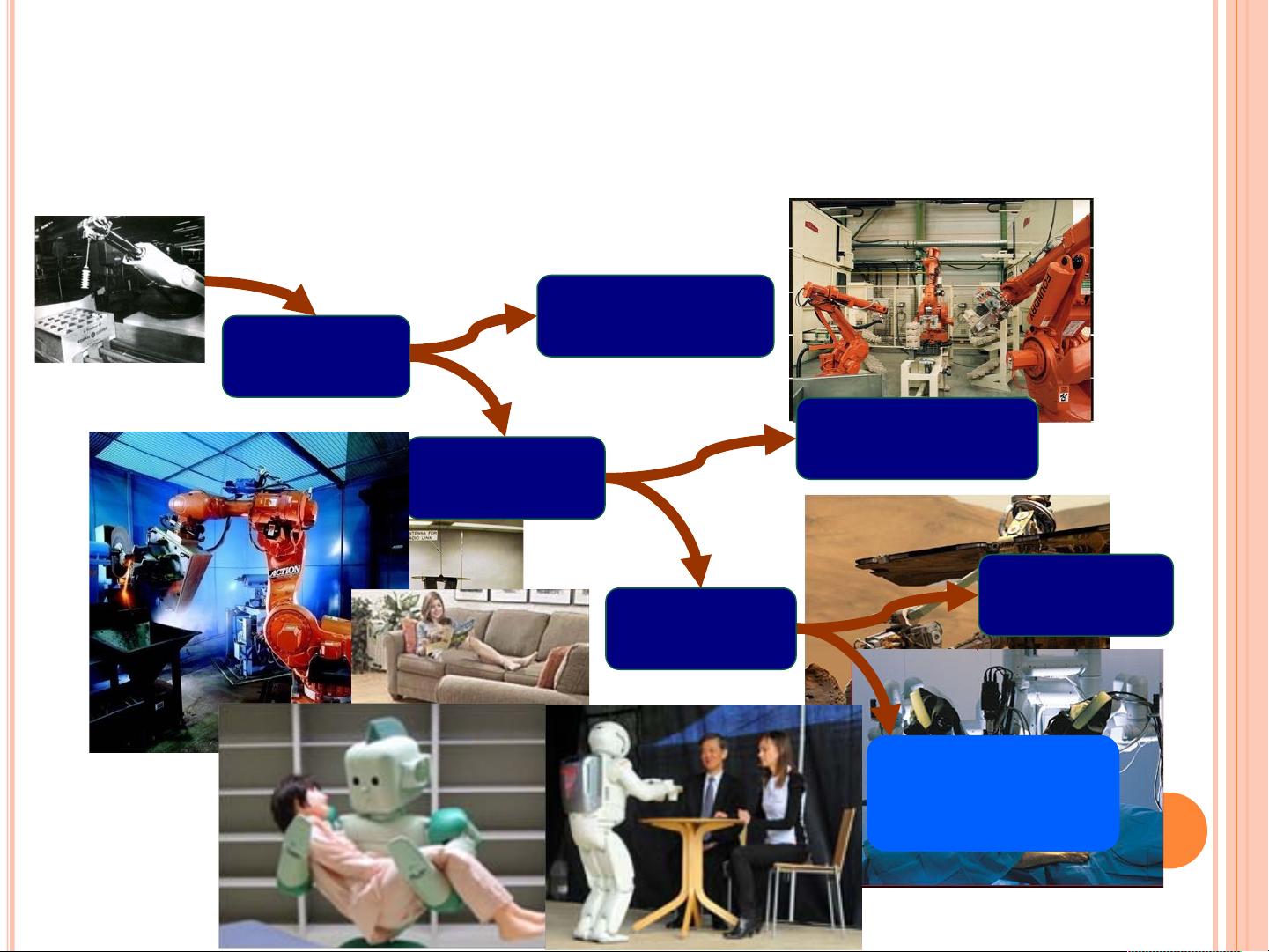
Industrial
Robotics
Mobile
Robotics
Personal
Interactive
Robotics
Manufacturing
Applications
Spatial
Applications
Medical
Applications
Service
Robotics
1975-1985
1985-1995
1995-2005
2005-
1954
1968
HV


剩余50页未读,继续阅读
229 浏览量
2021-09-18 上传
127 浏览量

D_Russell_
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 电力负荷和价格预测网络研讨会案例研究:用于日前系统负荷和价格预测案例研究的幻灯片和 MATLAB:registered: 代码。-matlab开发
- SHC公司供应商商行为准则指南
- QtCharts_dev_for_Qt4.8.6.zip
- 一款具有3D封面转动的效果
- selectlist:非空列表,其中始终仅选择一个元素
- ktor-permissions:使用身份验证功能为Ktor提供简单的路由权限
- 数据库课程设计---工资管理系统(程序+源码+文档)
- comparison_of_calbration_transfer_methods.zip:三个数据集校准传递方法的比较-matlab开发
- APQP启动会议
- NLW-后端:后端应用程序级别下一个星期NLW01 Rocktseat
- javascript-koans
- Información Sobre los Peces-crx插件
- COMP9102:COMP9102
- 第三方物流与供应链及成功案例课件
- squeezebox_wlanpoke_plot
- 学习Android Kotlin核心主题
