三菱PLC项目:物料分拣机构自动控制与步进顺控指令
版权申诉
183 浏览量
更新于2024-07-03
收藏 1.2MB PPT 举报
"三菱PLC课件PPT项目3--任务3.ppt 是一份关于三菱PLC应用技术的教育资料,主要讲解了如何使用步进顺控指令来实现物料分拣机构的自动控制。该课件涉及任务分析、相关知识、任务实施、知识拓展和任务拓展等多个部分,适合学习者深入理解PLC控制系统的设计与编程。
一、任务分析
本任务的核心是设计一个物料分拣系统,其中机械臂需在原点位置启动,经过一系列动作完成物料的分拣。当电源开关PS0合上后,机械臂按照向下-吸球-向上-向右-向下-释放球-向上-向左的顺序操作,每个动作完成后检查行程开关的状态以判断下一步动作。机械臂在上、下、左、右各位置设有行程开关SQ,用于监控其运动状态。此外,通过下端限位开关SQ2的接通或断开来区分机械臂吸取的大球还是小球。
二、相关知识--步进顺控指令应用
1. 选择性分支结构
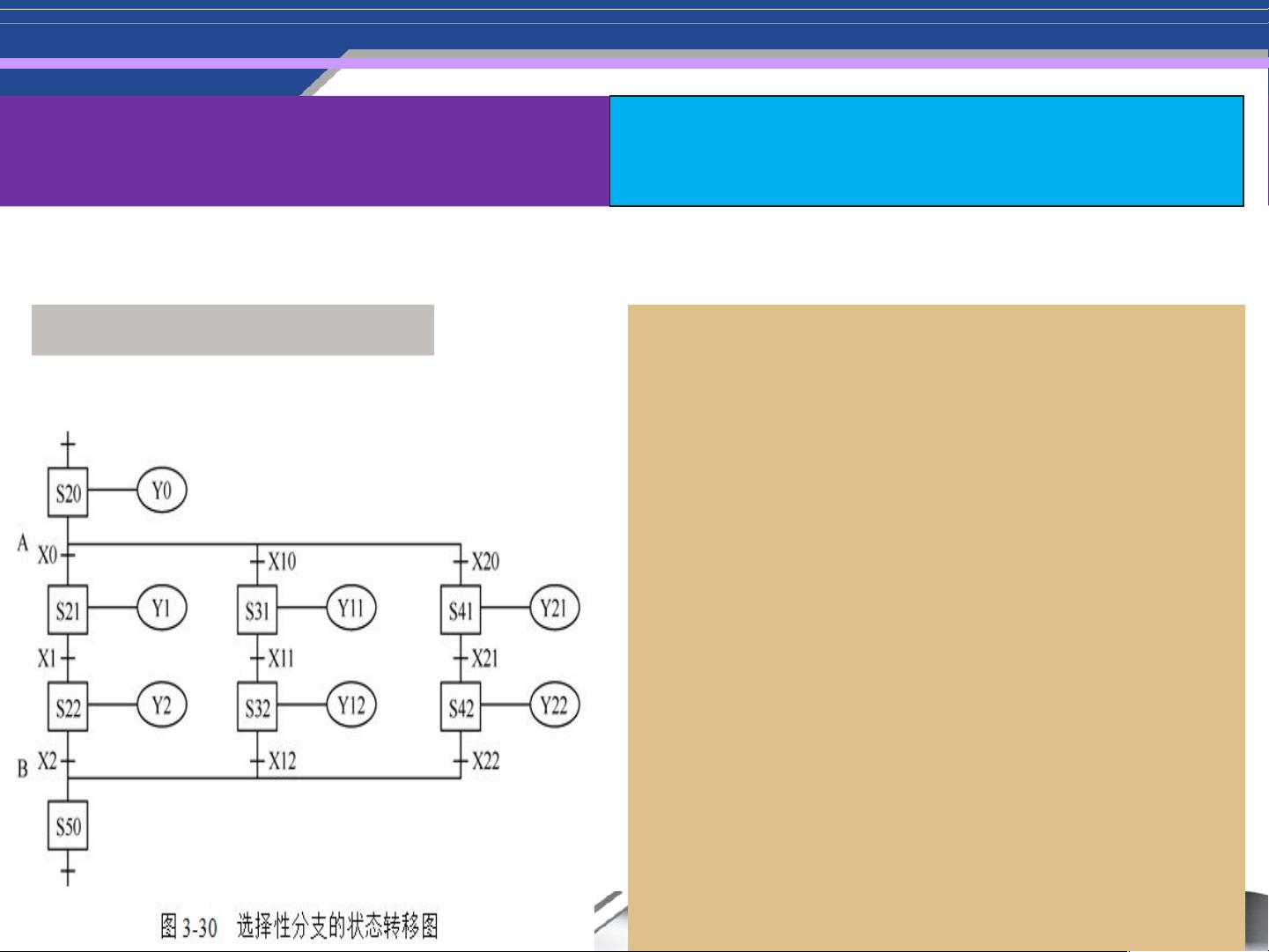
在PLC编程中,选择性分支结构允许根据不同的条件选择执行其中一个分支的程序。例如,S20步作为分支起点,如果X0、X10或X20任一条件满足,将分别执行对应的分支程序,但这些条件不能同时成立。S50步作为汇合状态,可以由S22、S32、S42中的任一步驱动,表示不同分支的程序执行完毕后汇集。
2. 选择性分支与汇合的编程
编程时,首先要处理分支转移,确定满足哪个条件后执行相应的分支程序,接着依次处理各个分支,最后进入汇合状态。这种方法确保了程序的逻辑清晰和有序执行。
三、任务实施
在实际实施过程中,需要选择合适的输入输出设备,分配I/O地址,并绘制接线图。输入设备包括X1到X6,分别对应左限位、下限位(小球动作)、上限位、释放小球和大球的右限位开关,以及系统启动和手动回原点开关。输出设备包括Y0(机械臂下降)和Y2(机械臂上升),它们将根据输入信号的状态来执行相应动作。
四、知识拓展与任务拓展
这部分可能涵盖更复杂的步进顺控设计、不同类型的分支结构、以及如何优化和调试PLC程序等内容,以帮助学习者提升在实际工程中应用PLC的能力。
这份课件详细介绍了如何使用三菱PLC实现物料分拣机构的自动控制,涵盖了从任务分析到编程实践的全过程,是学习和掌握PLC控制技术的宝贵资源。"
《 PLC 应用技术 》
项目 3 PLC 步进顺控指令应用
1 、选择性分支结构
任务 3 物料分拣机构的自动控制
二、相关知识 ---- 并行分支的步进顺控设计
从多个分支流程中选择执行某一个
单支流程,称为选择性分支结构。
图中 S20 步为分支(开始)状态,
该状态转移图在 S20 步以后分成了
3 个分支,供选择执行。
当 S20 步被激活成为活动步后,若
转换条件 X0 成立就执行左边的程
序,若 X10 成立就执行中间的程序
,若 X20 成立则执行右边的程序,
转换条件 X0 、 X10 及 X20 不能同
时成立。
S50 步为进入汇合状态,可由
S22 、 S32 、 S42 中任意一步驱
动
剩余17页未读,继续阅读
2023-03-31 上传
2023-03-31 上传
2022-06-09 上传
495 浏览量
555 浏览量
2024-10-25 上传
2024-09-06 上传
526 浏览量
2024-11-10 上传









