"简化C型腿六足机器人路径步态控制研究进展"
版权申诉
193 浏览量
更新于2024-03-02
收藏 703KB DOCX 举报
20世纪80年代以来,国内外多所大学和研究机构相继研制成功了性能卓越的六足机器人,如Genghis、Ariel、Asterisk、ROBOTURK、NORO等。这些机器人虽然在适应多种地形方面表现出色,但由于其足部具有多个自由度,导致控制步态变得复杂困难。为解决这一问题,科学家们结合仿生形态学和机构学理论,提出了一种C型腿六足机器人。C型腿六足机器人不仅具有简单的结构和控制方式,而且具备良好的适应性和机动性,成为当前研究的热点。
近年来,许多学者对C型腿六足机器人展开了深入研究。美国波士顿动力公司制作的RheX六足机器人不仅具有出色的机动性,而且在野外移动能力方面表现突出。此外,Haynes等设计并制作的X-RheX六足机器人相比前几代的RheX,具有更小的质量和更强的移动能力。而Zhang等制作的C型腿可变换的水陆两栖六足机器人,通过调整足部形状,实现了从陆地到水中的无缝转换。
这些研究者从仿生形态学和机构学中汲取灵感,设计出了简单且易于控制的机器人结构。此外,步态控制也成为六足机器人基础理论研究的核心内容,决定了各足运动的时序。因此,如何优化步态控制,提高六足机器人在攀爬楼梯等复杂环境中的性能,成为当前研究的重点之一。
本文以六足机器人攀爬楼梯为研究背景,探讨了路径优化步态控制的方法。首先介绍了六足机器人的发展历程,重点介绍了C型腿六足机器人的特点和优势。然后详细分析了步态控制的相关理论,包括步态生成算法、步态参数优化等内容。接着,提出了一种基于路径规划的步态优化方法,通过在攀爬楼梯过程中根据环境的变化动态调整步态参数,实现了更高效的运动方式。最后,通过仿真实验验证了该方法的有效性和性能优势。
总的来说,本文通过对六足机器人攀爬楼梯的路径优化步态控制进行深入研究,为提高六足机器人在复杂环境中的适应性和性能提供了重要的理论基础和实践参考。未来的研究方向可以进一步探讨不同类型六足机器人的路径规划和步态优化方法,以实现更加智能和灵活的机器人运动能力。
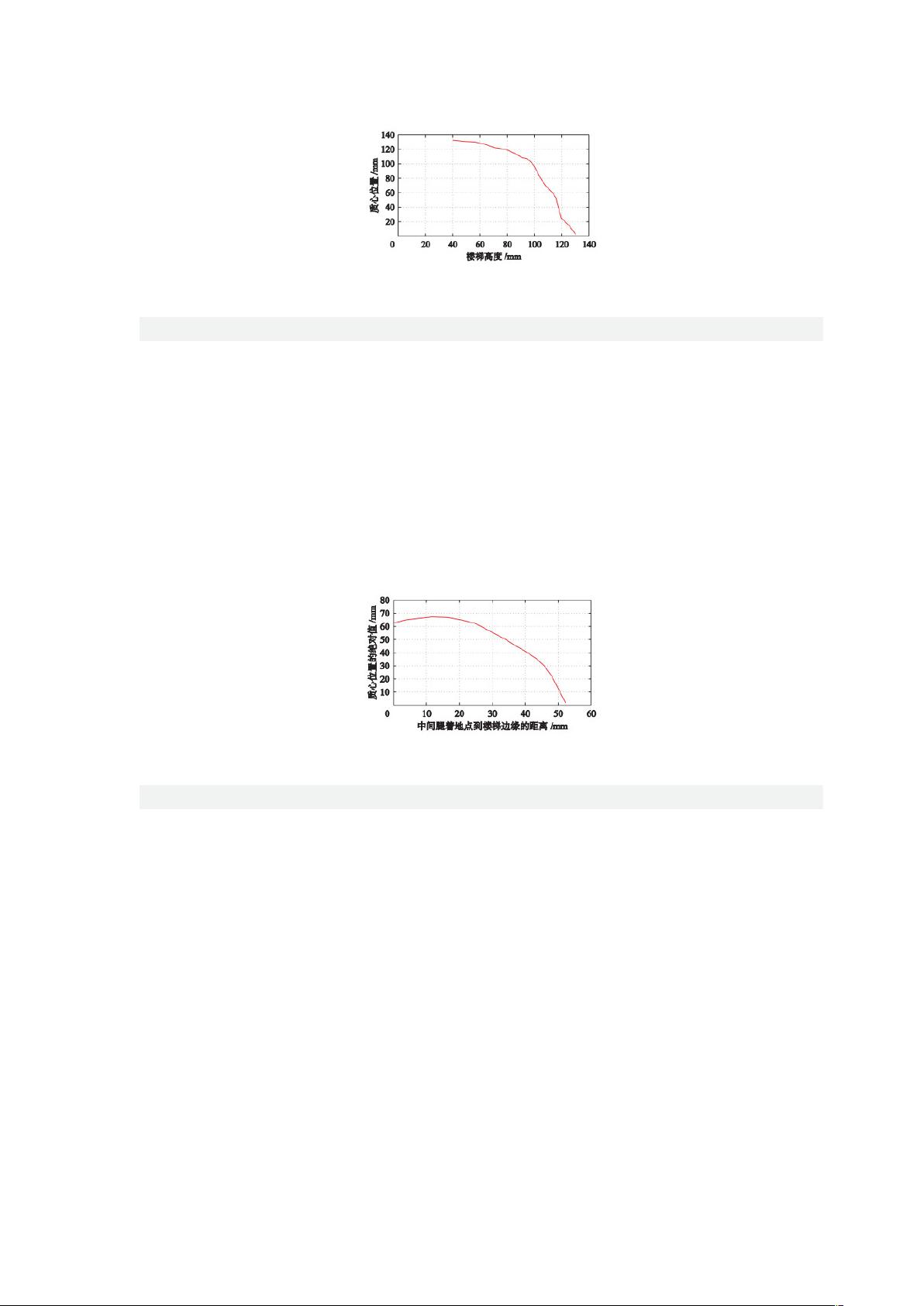
图 4 不同梯高对应的机器人质心位置 Fig.4 The centroid position of the robot corresponding to different stair
heights
图选项
根据图 4 的机器人质心变化情况可知:当 CLHR 机器人俯仰角最大时,其质心位置随着梯高的增
加而逐渐移向楼梯边缘.当梯高增加到 130 mm 后,机器人质心位置将超出 X 轴的零点,即超过楼梯边
缘,机器人会倾覆,使其攀爬楼梯失败.
1.2 改变步态
通过调整 CLHR 机器人步态来改变其中间足与楼梯面的接触位置,从而可以调整机器人俯仰角最大
时其质心的位置,如图 5 所示.
图 5 不同中间足着地点对应的机器人质心位置 Fig.5 The centroid position of the robot corresponding to
different middle legs locations
图选项
根据仿真实验分析:中间足着地点影响 CLHR 机器人在图 3 所示姿态下的质心位置,可将其分为
质心位置缓慢移向楼梯内侧和质心位置快速移向楼梯边缘两部分.其中前一变化对应图 5 中曲线上升部
分,曲线的最大值为 67.3 mm,对应的中间足着地点到楼梯边缘的距离是 14.2 mm.这部分变化是由于当
中间足着地点到楼梯边缘的距离小于 14.2 mm 时,随着机器人在 X 轴负方向上的移动距离不断增加,使
得其在图 3 所示姿态下质心位置逐渐移向楼梯内侧.而针对质心位置快速移向楼梯边缘,即图 5 所示曲线
的下降部分,这是因为随着中间足着地点到楼梯边缘的距离继续不断增大,使得在中间足着地后的转动过
程中,机器人底盘与楼梯边缘接触越来越早,C 型腿提供给机器人前进的摩擦力被楼梯边缘对机器人底盘
的相反力有所抵消.甚至当接触时间过早时,机器人在达到图 3 所示姿态前就会绕着接触点转动,最终使
机器人质心超出楼梯边缘,导致机器人倾覆,详细分析见 2.2 节.
1.3 改变楼梯宽度
当 CLHR 机器人的步态和梯高不变时,可以得到不同梯宽情况下,机器人俯仰角最大时的质心位置
在 X 轴方向上的变化情况,如图 6 所示.
剩余14页未读,继续阅读
2021-07-12 上传
2022-12-01 上传
129 浏览量
2023-10-05 上传
2022-11-28 上传
2022-11-13 上传

罗伯特之技术屋
- 粉丝: 4461
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
