MIT Mini Cheetah Ubuntu 18.04 仿真环境搭建指南
需积分: 10 20 浏览量
更新于2024-08-11
收藏 6.66MB PDF 举报
"这篇文档详细介绍了如何在Ubuntu 18.04环境下配置MIT Mini Cheetah的仿真环境,包括环境设置、问题解决和必要的软件安装。作者在尝试使用Ubuntu 20.04时遇到了许多问题,因此建议使用Ubuntu 18.04.4作为开发环境,以避免兼容性问题。文档中提到了一些关键的依赖包,如Eigen、QT5、lcm和Java 1.8.0。"
文章详细内容:
MIT Mini Cheetah是一款先进的四足机器人,其仿真环境的建立对于研究和开发至关重要。在Ubuntu 18.04操作系统上配置这个环境需要遵循一定的步骤,以确保所有必要的组件都能正确工作。
首先,确保你的系统是Ubuntu 18.04.4,因为这是MIT Mini Cheetah项目推荐的版本。在不同的Ubuntu版本上可能会遇到不兼容的软件包或错误。确保安装了以下软件版本:Eigen 3.3.9、QT 5.14.0、lcm 1.3.1、Java 1.8.0。
接下来,安装必要的依赖包。这通常包括用于图形处理的mesa-common-dev和freeglut3-dev,优化库coinor-libipopt-dev、libblas-dev和liblapack-dev,以及用于编译和构建的工具,如gfortran、cmake、gcc、build-essential、libglib2.0-dev。这些包可以通过运行`sudo apt install`命令来安装。
然后,需要安装lcm库,它是MIT Mini Cheetah通信的关键组件。虽然文档中提到lcm要求Java 6,但实际操作中可以使用更新的Java版本。首先安装git,通过`sudo apt-get install git`命令。之后,从GitHub克隆lcm项目,使用`git clone https://github.com/lcm-proj/lcm.git`。进入克隆的目录,创建一个名为“build”的子目录,并进入该目录。执行`cmake ..`来配置项目,接着运行`make`进行编译。编译成功后,将lcm库安装到系统中。
完成lcm的安装后,继续安装其他必要的软件和库,这可能涉及到Qt开发工具,以便与MIT Mini Cheetah的用户界面交互。如果在过程中遇到问题,可以参考作者提供的CSDN博客链接和其他在线资源,它们提供了更多关于环境配置、编译过程和错误解决的详细信息。
MIT Mini Cheetah的仿真环境配置是一项涉及多个软件组件和版本匹配的工作。遵循上述步骤并注意可能出现的兼容性问题,将有助于顺利完成环境搭建,从而进行有效的机器人控制和仿真测试。对于初学者或开发者来说,理解并遵循这些步骤是成功运行MIT Mini Cheetah仿真项目的基础。
MIT Mini Cheetah Ubuntu 18.04 环境配置
自己第一次写的比较正式一点的文档吧,有什么笔误,或者技术方面的问题可以提醒我一
下,我会注意的。
参考了MIT开源项目的一些网络资料。包括开发环境搭建的步骤,运行、遇到的问题以及解决
方法:
(5条消息) MIT Mini Cheetah Ubuntu 18.04 环境配置_sinat_23084397的博客-CSDN博客
(5条消息) MIT Cheetah编译环境搭建_onev2012的博客-CSDN博客
(5条消息) Mit Mini Cheetah开源代码开发环境搭建_Galaxy_Robot的博客-CSDN博客
华北舵狗王带你一起做四足机器人9 (MIT Cheetah 开源 代码 仿真器编译) - 知乎
(zhihu.com)
首先提醒一下大家它适用于这样的配置: Ubuntu 18.04.4 Eigen 3.3.90 QT 5.14.0 lcm 1.3.1 java
1.8.0 。所以首先检查一下自己系统版本和环境版本,我起初用的时Ubuntu20.04,但中间出现
了无数个阴间bug,也遇到了不少坑,耗费了我三四天的时间,分享出来,希望对遇到类似问
题的朋友有帮助。更多的内容后面持续分享出来。最后不得不放弃了,用18.04以后可以说是
无障碍的完成了这个过程。(所以环境版本很重要!)
下面正式的开始。。。。
1.获取安装依赖包 :
sudo apt install mesa%common%
dev freeglut3
%
dev coinor
%
libipopt
%dev libblas%dev liblapack%dev
gfortran liblapack%dev coinor%libipopt%dev cmake gcc build%essential libglib2.0%dev
2.安装编译lcm1.3.1(it says Java 6, but you can use newer) (https://lcm%proj.github.io/)命令安装
LCM库
安装git: sudo apt%get install git
克隆lcm:git clone https://github.com/lcm%proj/lcm.git
进入lcm目录:cd lcm
在lcm文件夹下建build文件夹:mkdir build
进入build目录:cd build
建立:cmake ..
编译:make
编译后的文件安装到系统:sudo make install
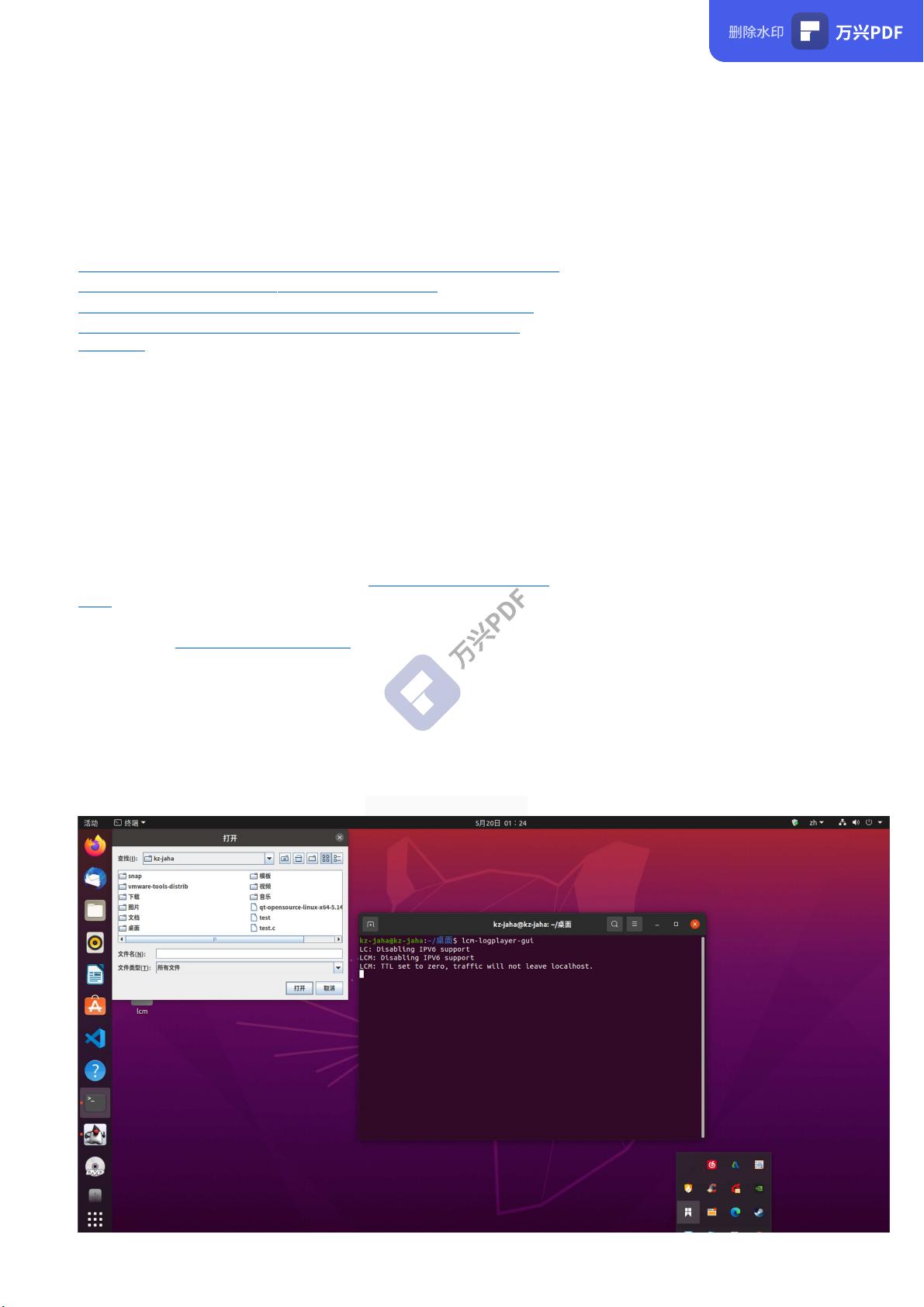
这是一个动态链接库管理命令,目的是为了让动态库为系统所共享: sudo ldconfig
终端输入下面指令测试,若是显示出界面则安装成功:lcm-logplayer-gui,看图:
2021年5月19日
21:48
万兴PDF
删除水印
万兴PDF
下载后可阅读完整内容,剩余9页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-09-02 上传
2020-11-19 上传
123 浏览量
186 浏览量
352 浏览量

~jaha~
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索HTML技术在压缩包子文件中的应用
- HTML日程规划工具:day-planner使用指南
- 深入解读奥美品牌成长的成功秘诀与技巧
- QuestStore: 一站式管理学生、教师及任务的CMS平台
- 易语言实现API函数SHFileOperationA复制文件教程
- 自动导航至百度的Chrome新标签页扩展程序
- 深入解析AXIS1.4客户端调用方法与源码工具
- 品牌知识全攻略:提升品牌价值与成功技巧
- ListViewCtrlEx_Demo:自定义ClistCtrl控件演示
- 易语言SUI界面引擎完整源码解析与应用
- HTML压缩包子文件解压缩教程
- Python实现Dockerfile自动优化工具
- Epsilon库V0.6.0发布:Python开发者的新选择
- 谷歌师兄开发IT社区英语学习资源
- 实现Android日历控件的手势滑动功能
- 实现AWS Lambda中的SQLite数据库持久化存储
