"基于STM32的六足仿生机器人设计与仿真分析"
版权申诉
154 浏览量
更新于2024-04-07
收藏 2.82MB DOCX 举报
Based on the document "Design of Hexapod Bionic Robot Based on STM32 - Version 5.0" and the research on Hexapod Robotics, this study focuses on the analysis of the kinematics of a Hexapod Bionic Robot, which is a type of legged robot known for its stable movement in complex terrains. The research aims to develop a thorough understanding of the kinematic equations governing the movement of the robot and analyze the walking foot movement space. Through the utilization of Matlab's Robotics Toolbox and genetic algorithms, the study also plans the movement trajectory of the walking feet. Furthermore, a comprehensive dynamic simulation analysis is conducted in Adams software to validate the structure and movement performance of the robot.
Additionally, this study addresses the design of two auxiliary structures for the Hexapod Bionic Robot - anti-skid mechanism and distance measurement. These structures play a crucial role in enhancing the robot's overall functionality and performance. By integrating these auxiliary structures into the robot's design, the study aims to improve the robot's stability, traction, and navigation capabilities.
In conclusion, the research presented in this study provides valuable insights into the design and analysis of a Hexapod Bionic Robot based on STM32 technology. Through the detailed kinematic analysis, trajectory planning, and dynamic simulation, the study aims to enhance the understanding of the Hexapod Robot's movement capabilities and performance. Additionally, the design of auxiliary structures further improves the robot's functionality, positioning it as a promising solution for various applications across different industries.
Keywords: legged robot; kinematic simulation; auxiliary structural design
2
相互交替,每次行进都是三足悬空、三足接地,以三角形支架结构交替前行。让重心保
持在三角形中,使得六足机器人在行进中有着良好的稳定性。
1.3 国内外关于六足仿生机器人的研究状况
随着人类科学技术的发展,人们对未知的探索越发热切,探索范围越来越大、越来
越深。期间充满危机,科技的快速发展也难以护得探索者周全。这时代替人类担任探索
任务的机器人应运而生。
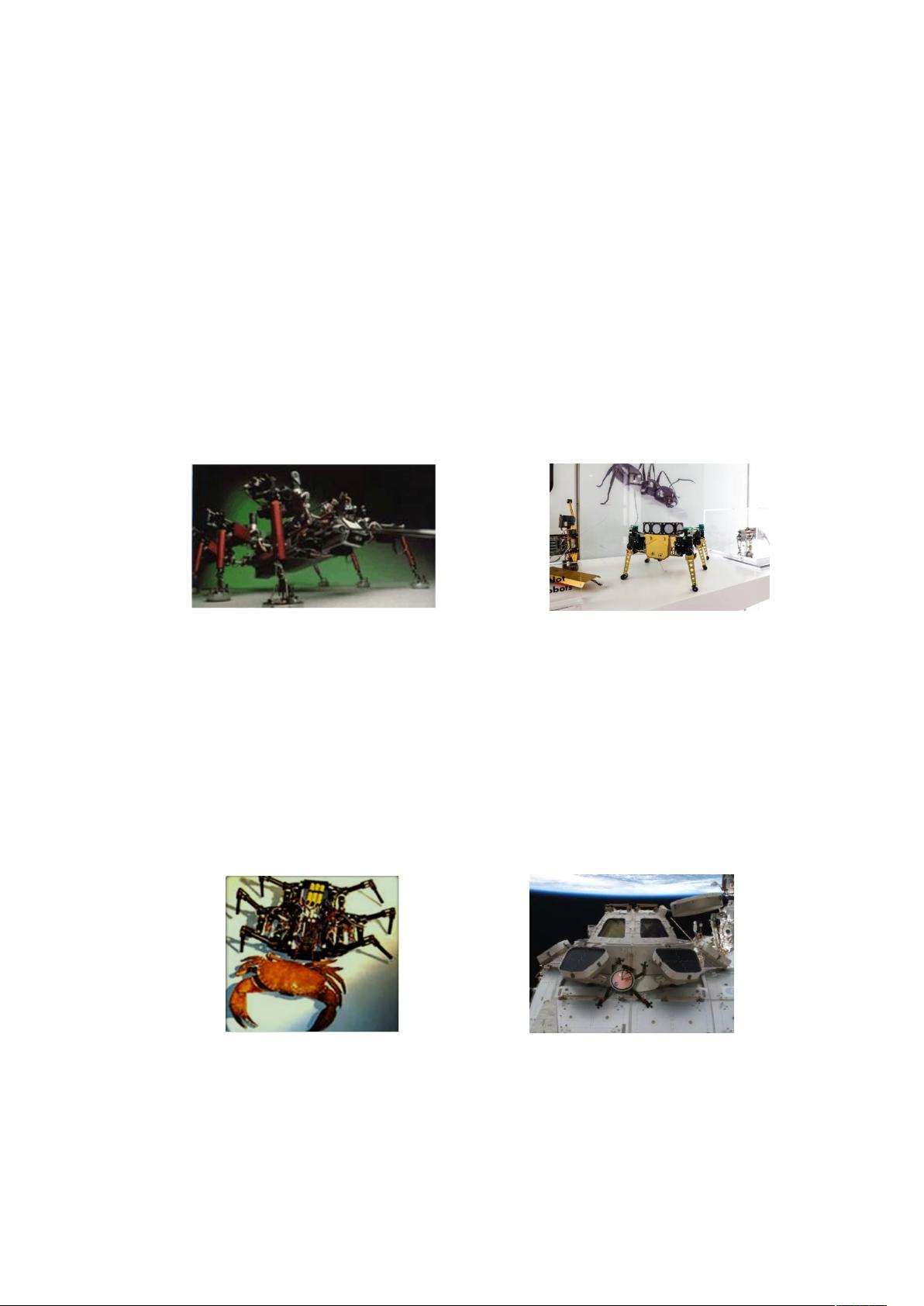
为了探索外星地貌,人类需要一种适应复杂地形环境的机器人。就这一目标美国于
1980 年起便开始了对六足机器人的研究,后来推出了 Genghis、Hannibal(图 1、图 2)
等六足机器人。
图 1 Hannibal 图 2 Genghis
1995 年前后 Rockwell 公司还研发了用以河道排雷的六足机器人 ALUV(图 3),在
设计时仿照了螃蟹的结构,且该机器人还可水陆两用,显示出了六足机器人对环境适应
性强的特点。
到了二十一世纪 NASA 因为勘探的需求,加大了在六足机器人的研发。作为收获,NASA
在 2002 年和 2005 年前后推出微型仿生蜘蛛机器人和 Lemur 系列(图 4)。其中 Lemur
系列已经可以应用于外太空的勘探和协助宇航员进行空间站的维修建设任务。
图 3 ALUV 图 4 Lemur
国内的六足机器人的研究大概在上世纪八十年代末,由清华大学、燕山大学、北京
航空航天大学、上海交通大学、哈尔滨工程大学、沈阳自动化研究所、哈尔滨工业大学
等大学机构进行了有关的研究。中国科学院沈阳自动化研究所与光机所于 1989 年 3 月
共同研制了海蟹号六足步行机器人。华中科技大学研制的“4+2”步行机器人。[1]还有
剩余30页未读,继续阅读

南抖北快东卫
- 粉丝: 80
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java集合ArrayList实现字符串管理及效果展示
- 实现2D3D相机拾取射线的关键技术
- LiveLy-公寓管理门户:创新体验与技术实现
- 易语言打造的快捷禁止程序运行小工具
- Microgateway核心:实现配置和插件的主端口转发
- 掌握Java基本操作:增删查改入门代码详解
- Apache Tomcat 7.0.109 Windows版下载指南
- Qt实现文件系统浏览器界面设计与功能开发
- ReactJS新手实验:搭建与运行教程
- 探索生成艺术:几个月创意Processing实验
- Django框架下Cisco IOx平台实战开发案例源码解析
- 在Linux环境下配置Java版VTK开发环境
- 29街网上城市公司网站系统v1.0:企业建站全面解决方案
- WordPress CMB2插件的Suggest字段类型使用教程
- TCP协议实现的Java桌面聊天客户端应用
- ANR-WatchDog: 检测Android应用无响应并报告异常
