双目立体视觉:密集型重构与模板匹配的挑战
需积分: 9 198 浏览量
更新于2024-07-15
收藏 7.92MB PPTX 举报
立体重构与模板匹配是机器视觉领域的重要技术,它涉及利用两幅或多幅从不同角度拍摄的相同场景的图像,通过对物体进行三维空间的重建。本节主要关注双目立体视觉,假设摄像机已经经过标定,因为标定能确保外极线的准确处理,这对于立体匹配至关重要。
首先,立体匹配是立体重构的关键步骤,它通过计算每个像素点的视差值来确定两个视图之间的相对位置。这实质上是一个模板匹配问题,即在一幅图像中寻找另一幅图像的局部区域,最常使用的匹配方法包括基于灰度值的SAD(Sum of Absolute Differences)和SSD(Sum of Squared Differences),这两种方法计算简单,但易受光照变化的影响。为了提高稳定性,归一化互相关系数(Normalized Cross Correlation,NCC)也被广泛应用,尽管计算成本较高,但它能更好地抵抗光照变化。
图3.118展示了使用不同NCC窗口大小(如3×3、17×17和31×31)进行匹配的结果,表明匹配窗口的大小选择对匹配精度至关重要。窗口过小可能导致误匹配,而窗口过大则可能在边缘和细节区域产生不准确的结果。因此,需要平衡特征提取的精度和匹配速度。
匹配过程中,特征的缺乏和遮挡是常见的问题。缺乏特征可以通过调整匹配相似度阈值来解决,但最好的做法是在匹配前识别并剔除这些区域。对于遮挡,视差一致性校验是一种有效的策略,通过检查相邻像素的视差一致性来判断是否存在遮挡。
模板匹配的一个典型应用场景是图3.120所示的PCB板上基准标志定位,当光照条件稳定时,SAD和SSD能够提供良好的匹配结果。然而,光照变化会显著影响这些方法的性能,这时NCC的鲁棒性就显得尤为重要。
为了进一步提高匹配效率,图像金字塔技术被引入。通过将图像缩放多级(例如2×2的尺度),金字塔允许在不同分辨率下进行匹配,从而在保持足够精度的同时加快计算速度。这样可以在复杂场景下处理更大范围的搜索,提高了立体匹配的效率和准确性。
总结来说,立体重构与模板匹配是机器视觉领域中的关键技术,它涉及到复杂的几何计算、光照稳定性处理和数据结构优化。理解并熟练运用这些方法,能够帮助我们在实际应用中实现精确的三维重建和目标检测。
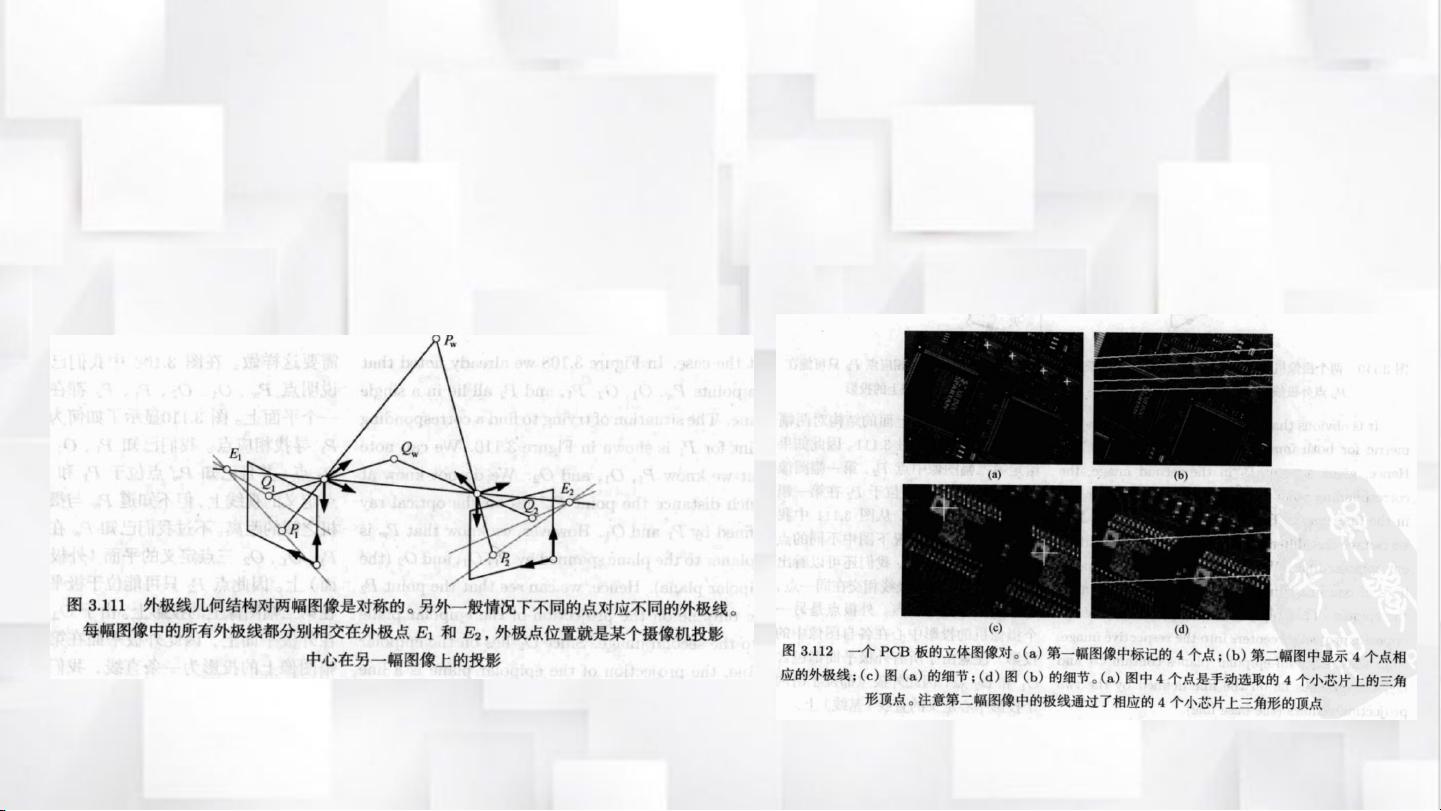
上图的结构对两幅图像是对称的,若给定,则一定位于第一幅图的外极线
上,具体如左下图所示,其对应实例如由下图所示:
剩余27页未读,继续阅读
2023-02-26 上传
2023-05-26 上传
2023-05-26 上传
2023-03-21 上传
2023-04-20 上传
2024-10-30 上传
2023-05-29 上传

drunk_snail
- 粉丝: 156
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
