FANUC机器人Process IO接线配置详解
版权申诉
"本文档详细介绍了FANUC机器人Process IO的接线及信号配置方法,主要涉及R-30iB控制柜中的不同接口板,包括A柜的MA、MB板,B柜的JA、JB板,以及MATE柜的CRMA15、CRMA16。文档内容涵盖接线前的准备工作、外部设备的接线要求、所需技能以及具体的工作步骤。"
在FANUC机器人的Process IO接线及信号配置中,首先需要理解R-30iB控制柜的I/O外围设备接口是由特定的印刷电路板和单元构成,这些接口能够根据实际应用需求进行选择。在开始接线工作前,需要准备对应的R-30iB控制柜Process IO接线图、端子台以及各种接线工具,如导线、螺丝刀和剥线钳。
在接线之前,必须了解外部输入输出设备的极性特性和接线要求,这关系到设备能否正确工作,避免因错误接线导致的设备损坏或功能失效。此外,执行接线操作的人应具备读懂接线图的能力,并持有电工证书以确保安全操作。
Process IO接线主要涉及A柜的MA、MB板,B柜的JA、JB板,以及MATE柜的CRMA15、CRMA16。以R-30iB控制柜A柜的MA板(如CRMA52A、CRMA52B)为例,MA板安装在A柜的特定位置,并通过I/O Link线与主板的JD1A接口相连,MA端接入接口JD1B,遵循B进A出的原则,可串联多个MA板。
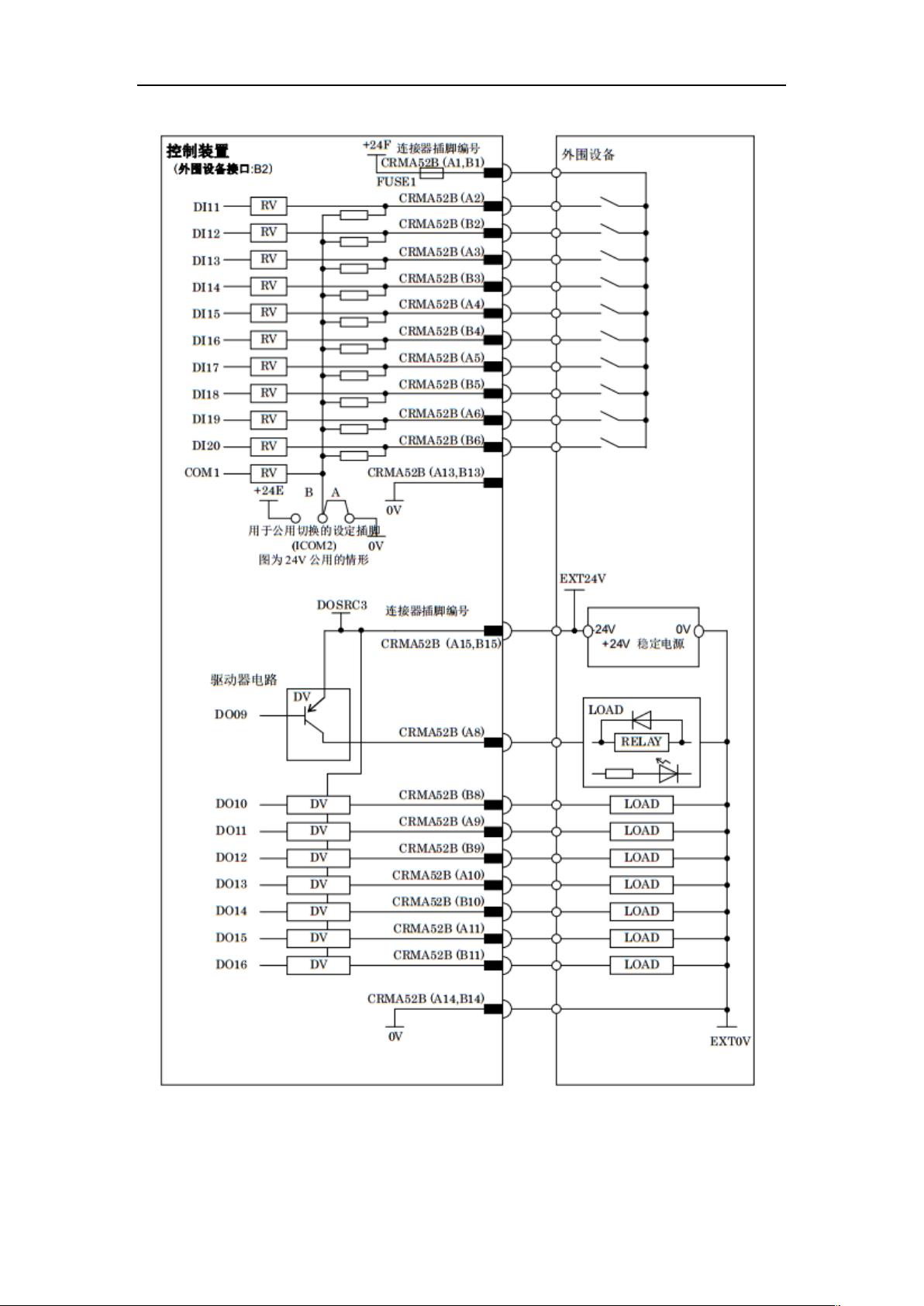
MA板的接线操作包括与外围设备的连接,其接线图清晰展示了各个端子的连接方式。MA板有CRMA52A和CRMA52B两个接口,每个接口提供10个输入和8个输出,总共20个输入和16个输出。输入端接线时,需根据外围设备的公共端要求设置MA板上的跳线,例如,当外围输入要求共24V时,将跳线置于A端,共0V时置于B端。接线操作应根据端子台点位图进行,确保正确连接每个输入和输出点。
FANUC机器人Process IO的接线及信号配置是一项细致且专业的工作,涉及到电路板的选择、外部设备的兼容性、接线规则以及安全操作。正确的配置能够确保机器人系统与外围设备的有效通信,从而实现自动化任务的顺利执行。
5 / 24
图 5:CRMA52B 接线图
剩余23页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

AAA_自动化工程师
- 粉丝: 7151
- 资源: 3493
 我的内容管理
展开
我的内容管理
展开







