AutoQuad M4飞控教程:V1.6新增BootLoader详解
需积分: 21 74 浏览量
更新于2024-07-17
1
收藏 2.53MB PDF 举报
"AutoQuad M4教程V1.6是反重力航模提供的一个关于AutoQuad M4飞控的使用指南,该版本增加了BootLoader的说明。教程详细介绍了飞控的硬件配置,包括STM32F405主控芯片、MPU6000加速度计与陀螺仪、HMC5983磁力计、MS5611气压计、CAN收发器、TF卡插槽、MICROUSB接口、多个UART接口、PWM接口、RC输入以及电池电压检测等功能。飞控通过UART接口使用MAVLink协议与地面站、数传电台、OSD、光流模块等设备通信。USB接口作为虚拟串口,同样遵循MAVLink协议,便于与地面站连接。用户需要在地面站进行设置,如比特率和MAVLink协议选择,以确保正确连接。"
在AutoQuad M4教程V1.6中,飞控的硬件组成部分是关键知识点,包括高性能的STM32F405微控制器,它具有168MHz的工作频率,以及各种传感器如MPU6000、HMC5983、MS5611,这些传感器分别用于姿态感知、磁场测量和高度计算。此外,飞控还配备有CAN总线支持和两个基于MAVLink协议的UART接口(UART1和UART2),这些接口可用于连接不同类型的扩展模块。如果用户不使用PWM7和PWM8通道,它们可以被配置为UART2,实现更多串行通信功能。
UART接口的使用方法是通过MAVLink协议进行数据交换,这是一个广泛应用于无人机和机器人领域的标准化通信协议,能够确保不同设备间的数据传输准确无误。飞控上的USB接口则提供了一个方便的连接方式,它能够模拟串行通信,使得飞控可以直接与电脑上的地面站软件(如QGroundControl)进行通信,而无需额外的硬件适配器。
在实际操作中,用户需要将飞控通过USB线连接到电脑,等待飞控的电源和ready灯显示正常状态。接着,用户需确保电脑识别出飞控并安装了正确的驱动程序。在地面站软件中,用户应选择相应的串口、比特率,并设定协议为MAVLink,然后点击连接按钮以建立与飞控的连接。
教程中提到的QGroundControl是常用的无人机地面控制站软件,它支持多种飞行控制系统,包括AutoQuad M4。通过QGroundControl,用户可以进行飞行前的参数配置、实时监控飞行状态、接收遥测数据,以及进行固件升级等操作。
AutoQuad M4教程V1.6为用户提供了全面的硬件介绍和连接指导,帮助用户更好地理解和使用这款高性能的飞控系统,无论是对于新手还是经验丰富的无人机爱好者,都是宝贵的参考资料。
6
QQ 群: 559415874 反重力航模:https://shop118590534.taobao.com/
3.3 遥控器通道观察
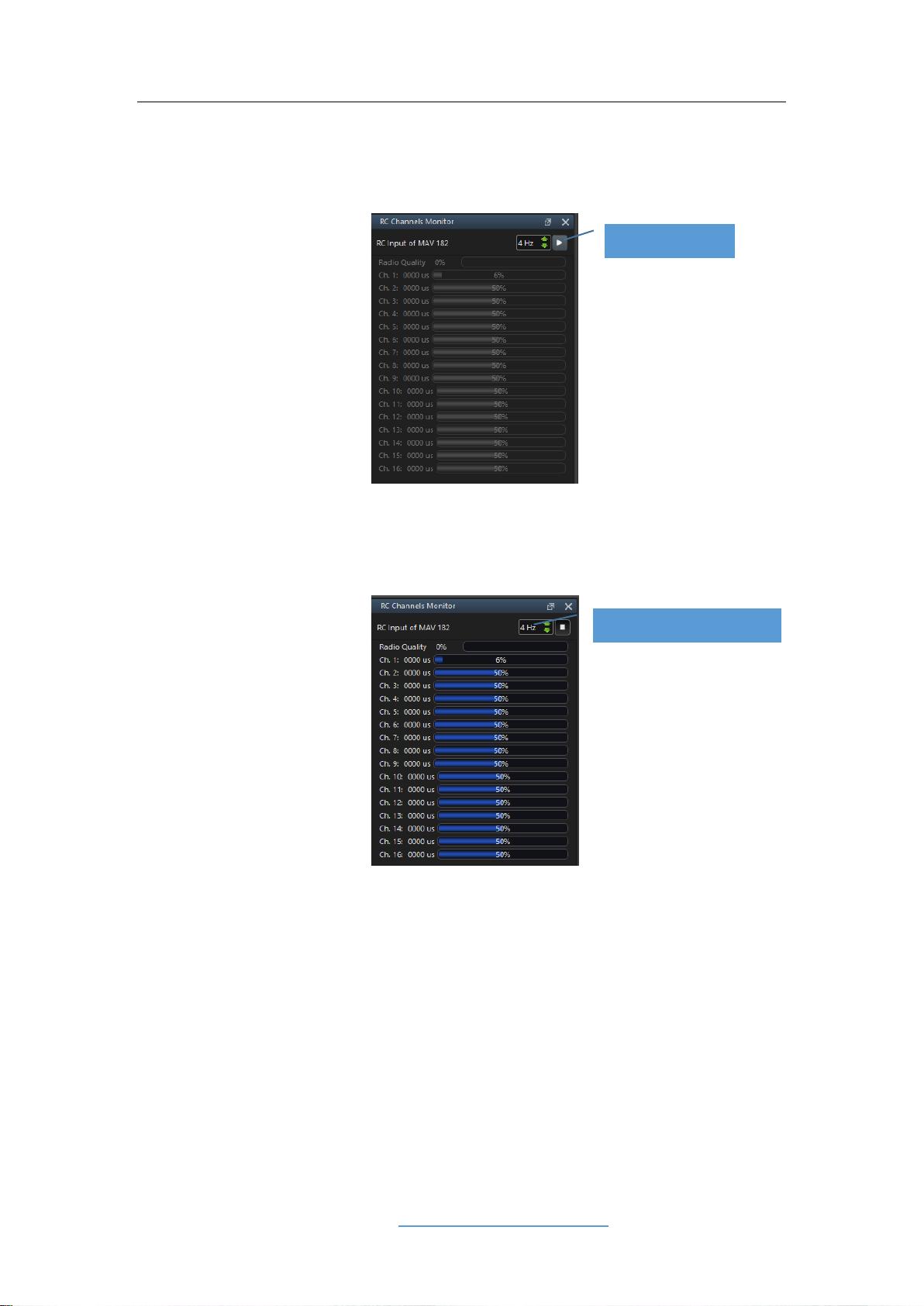
在地面站上点击 Tool Widgets,选择 RC channels monitors:
RC channels monitors 默认是暂停状态,需要点击右上角那个开始按钮后才开始显示实
时的遥控器通道值,点击后这个窗口变为这样:
好了,这时候你用遥控器打杆,就会看到相应的通道有变化,如果你觉得通道值显示时
实时性不好,就调大右上角那个 Hz 值,调到 20 基本就很好了。
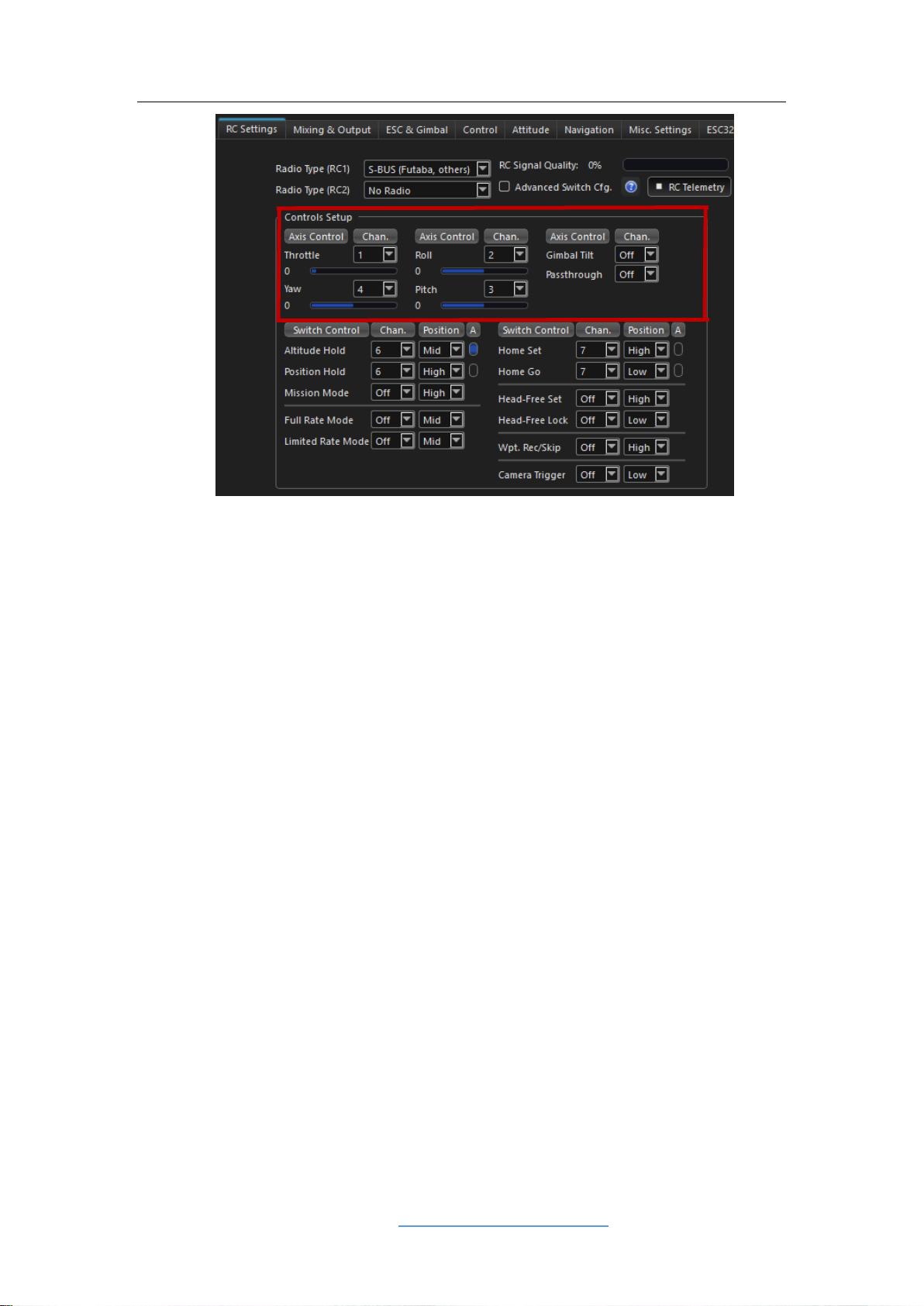
除了这个观察方法外,RC Settings 界面上也能观察到相应通道的值,见下图红色框
点此开始显示
增大这里,提高实时性
剩余32页未读,继续阅读
195 浏览量
1169 浏览量
点击了解资源详情
点击了解资源详情
523 浏览量
139 浏览量
290 浏览量
127 浏览量

virus009
- 粉丝: 1
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







