"ABB机器人的硬件连接与IO通信控制详解"
142 浏览量
更新于2024-01-02
收藏 25MB PPT 举报
机器人的硬件连接和IO通信是指机器人系统中各硬件设备的连接方式以及与外部设备之间的输入输出通信机制。本文通过分析“机器人的硬件连接和IO通信PPT文档.ppt”以及相关文档的内容,总结如下:
一、ABB机器人的硬件连接
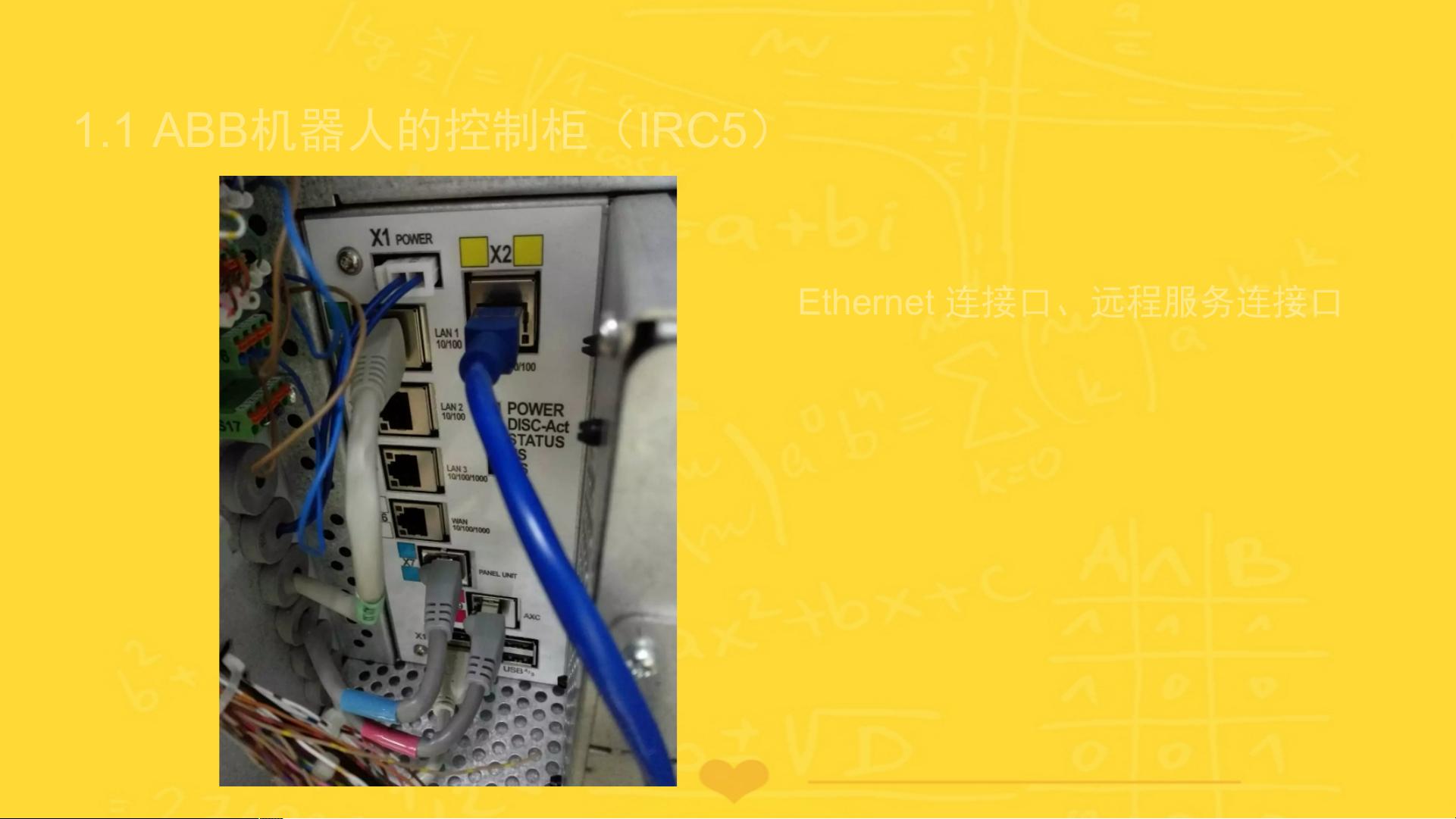
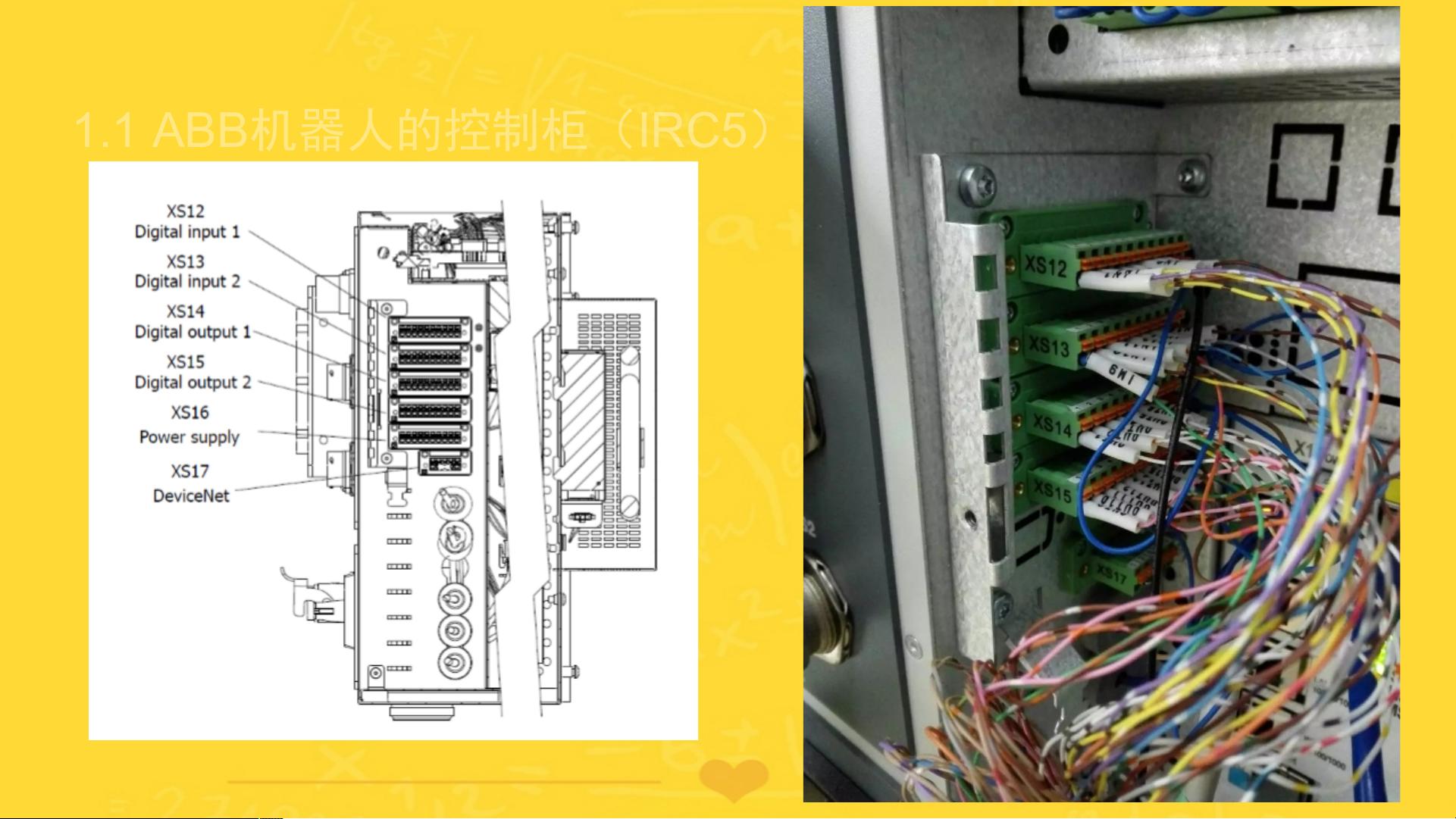
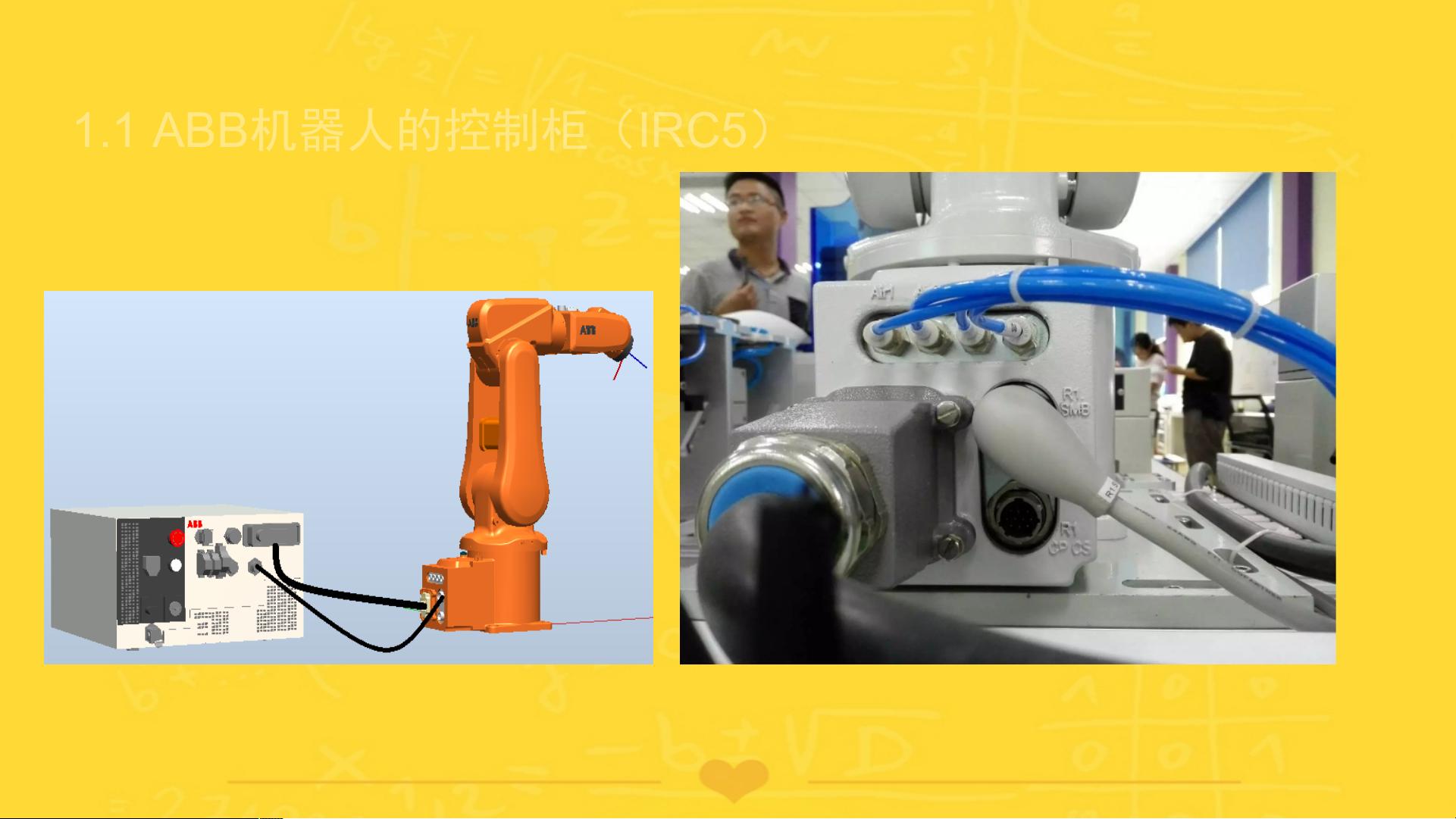
1. ABB机器人的控制柜(IRC5)
ABB机器人采用IRC5控制柜作为核心控制单元。该控制柜具有紧凑型设计,能够容纳机器人控制器、驱动器、电源等必要设备。控制柜中包括各类连接端口和接口,用于与机器人各个组件的连接。
2. 急停按钮
机器人的硬件连接中,急停按钮起到立即停止机器人运动的重要作用。机器人操作中,一旦遇到紧急情况,操作人员可以通过按下急停按钮来迅速停止机器人的动作,保护人身安全。
3. 机器人马达上电/复位按钮
机器人马达上电/复位按钮是用于机器人系统的启动和复位的关键设备。操作人员可以通过按下该按钮来完成机器人系统的启动和复位操作,确保机器人能够正常工作。
4. 模式开关
模式开关可实现机器人系统的手动和自动模式切换。当模式开关处于手动模式时,机器人将处于手动控制状态,操作人员可以通过遥控器或操纵臂对机器人进行控制;而当模式开关处于自动模式时,机器人将按照预设程序自动执行任务。
5. 机器人本体松刹车按钮
机器人本体松刹车按钮用于控制机器人的刹车状态。在机器人刹车状态下,其各轴将处于固定位置,不会移动。而当操作人员按下松刹车按钮,机器人将解除刹车状态,可以进行正常运动。
6. 220V电源接入口
机器人系统中,需要供电的设备众多,其中包括控制柜、驱动器、传感器等。220V电源接入口用于连接机器人系统所需的电源,以支持机器人和相关设备的正常工作。
7. 主电源控制开关
主电源控制开关是机器人系统的电源开关装置。当需要启动或关闭机器人系统时,操作人员可以通过操作主电源控制开关来实现对整个系统电源的控制。
二、ABB机器人的IO通信
IO通信主要用于机器人系统与外部设备之间的数据传输。ABB机器人系统通过IO模块来实现与外部设备的通信。IO模块具有多种传输接口和通信协议,可以根据实际需求进行选择和配置。
ABB机器人的IO通信可以实现以下功能:
1. 与传感器的通信:通过IO模块与各类传感器进行连接,实现对传感器数据的读取和控制。
2. 与执行器的通信:通过IO模块与各类执行器(如电磁阀、伺服马达等)进行连接,实现对执行器的控制和驱动。
3. 与外部系统的通信:通过IO模块与外部系统(如PLC、PC等)进行数据传输,实现机器人系统与外部系统之间的数据交换。
4. 与人机界面设备的通信:通过IO模块与人机界面设备(如触摸屏、按钮等)进行连接,实现人机交互操作。
总结:以上内容为对“机器人的硬件连接和IO通信PPT文档.ppt”中ABB机器人的硬件连接和IO通信内容的总结。通过本文的总结,我们可以了解ABB机器人的硬件连接方式和各硬件设备的功能,以及机器人系统与外部设备之间的IO通信实现的功能和方法。这些内容对于理解并应用ABB机器人系统具有重要的参考价值。
一、ABB机器人的硬件连接
1.1 ABB
1.1 ABB
机
机
器
器
人
人
的
的
控
控
制
制
柜
柜
(
(
IRC5
IRC5
)
)
Ethernet
Ethernet
连
连
接
接
口
口
、
、
远
远
程
程
服
服
务
务
连
连
接
接
口
口
剩余66页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-07 上传
2024-04-29 上传
2024-04-24 上传
2021-10-05 上传
2021-10-07 上传
2023-07-05 上传

Mmnnnbb123
- 粉丝: 750
- 资源: 8万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
