




水下机器人分布式编队控制:自适应SOM神经网络方法
需积分: 50 34 浏览量
更新于2024-08-30
收藏 948KB PDF 举报
"这篇论文提出了一种自适应自组织映射(SOM)神经网络方法,用于水下机器人(AUVs)的分布式编队控制。该方法允许一组AUV在保持编队形状的同时移动到预设路径上的目标位置,并考虑了工作负载平衡和能源效率。此外,编队还能够避开障碍物并根据需要改变形状。"
在现代海洋探索和科学研究中,自主水下机器人(AUVs)的编队控制是至关重要的技术。论文“An Adaptive SOM Neural Network Method for Distributed Formation Control of a Group of AUVs”探讨了如何利用自适应自组织神经网络实现这一目标。SOM神经网络是一种无监督学习算法,它能够自组织地将输入数据映射到一个二维结构上,形成所谓的“地图”。
在本文中,作者 Xin Li 和 Daqi Zhu 提出的方法中,每个AUV的控制器只使用自身的信息以及有限的邻居AUV的信息,实现了控制律的分布式设计。这样可以减少通信开销,提高系统的鲁棒性和可靠性。编队控制策略基于自我组织的竞争计算,同时考虑了工作负载平衡,确保所有AUV在完成任务的同时能有效地分配能量。
论文进一步阐述了如何通过这种控制策略使AUV编队能够在预定轨迹上按照期望的编队形状达到目标位置。在遇到障碍时,编队能够灵活地调整其形状以避开障碍物,体现了编队的动态适应性。此外,这种分布式领导者-跟随者结构使得整个系统更加稳定,因为领导AUV可以引导其他成员,而每个成员只需关注与其相邻的AUV。
论文内容深入探讨了自适应SOM网络的具体实现细节,包括网络训练过程、邻域关系的定义、以及如何根据环境变化实时调整控制策略。通过仿真和可能的实验验证,作者证明了该方法的有效性和实用性,为水下机器人编队控制提供了新的理论和技术支持。
这篇论文为水下机器人编队控制提供了一个创新的解决方案,结合了机器学习和分布式控制理论,有望在海洋探测、海底作业等领域得到广泛应用。这种方法不仅提高了AUV编队的自主性,还确保了任务的高效执行和系统的稳定性。
8262 IEEE TRANSACTIONS ON INDUSTRIAL ELECTRONICS, VOL. 65, NO. 10, OCTOBER 2018
Fig. 1. Plan view of a tr i angular formation example with three randomly
distributed AUVs.
reduction of the total traveling cost and the workload balance of
every single AUV are taken into consideration.
B. Thinking in SOM
The SOM neural network method was first introduced by T.
Kohonen in the 1980s and extended later [32]–[34]. It is based
on the idea that there is a special order of processing units in
the mammalian brain. Each unit is dedicated to a specific task
and each group of neurons is sensitive to a particular type of
input signal. The units are determined by parameters that can be
changed in certain processes to produce meaningful organiza-
tions. This algorithm soon became a valuable tool and was used
to solve many kinds of problems. In recent years, this method
has been applied to solve task assignment problems and control
of multirobot systems [35]–[38].
In this paper, we develop an SOM-based approach that could
be applied to the formation-control problems by improving the
previous SOM method. The idea comes from the similar char-
acteristics and phenomena between a multi-AUV system and an
SOM network. First, a multi-AUV formation system is the same
as a self-organizing system that only changes its inner structure.
Second, the SOM algorithm has the competitive, cooperative,
and self-organizing characteristics that are attractive for a multi-
AUV system. Thus, the SOM network could be adapted to an
unordered team of AUVs to automatically achieve the desig-
nated locations with cooperation and competition. The AUV
formation could be achieved in this way. By the formation-
tracking strategy, the movement and tracking of the formation
is also realized. In this paper, we propose an improved workload
function, which makes sure that the traveling length of a single
AUV is balanced within a limited range.
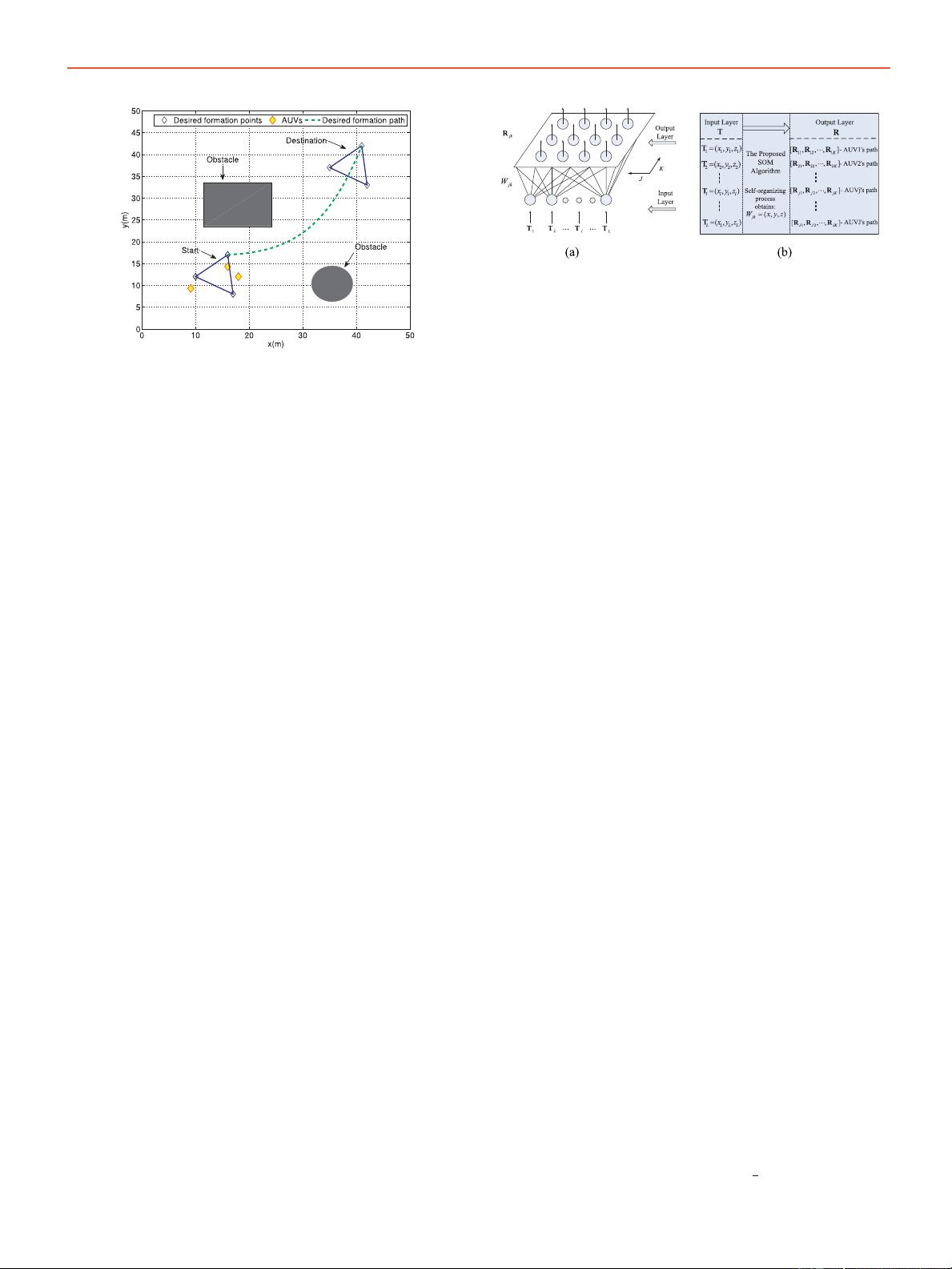
An SOM-based neural network model is shown in Fig. 2(a),
and the mapping relationship is shown in Fig. 2(b). The proposed
algorithm could be executed within a reasonable computation
time, emphasizing on workload balance for each AUV in the
team. At the initial state, there are J AUVs randomly distributed
in the workspace, where J ∈ N
+
. L points are set at the key
positions of the expected formation shape. For instance, there
are three points to form a triangle as Fig. 1 illustrates, so that we
Fig. 2. Structure of SOM Neural Network. (a) The structure (T
l
: coordi-
nates of the lth point; R
jk
: coordinates of AUV at a certain time instant).
(b) Mapping relationship of the two layers.
obtain L =3. In this way, the SOM model has two layers of neu-
rons. The first layer is the input layer including L neurons, where
L ∈ N
+
. These neurons represent the Cartesian coordinates of
the points in the 3-D workspace. T is a 3 × L matrix that de-
notes the coordinates of the target points as input neurons. Each
input neuron has three parameters (x
l
,y
l
,z
l
) according to the
coordinates of its corresponding point, where l =1, 2,...,L.
All the coordinates of the points form the input data set. The
second layer is the output layer. Neurons in the output layer
represent the coordinates of the AUVs and the corresponding
path for each AUV. Each neuron of the output layer is fully con-
nected to the neurons of the input layer. There are K neurons to
establish an optimal path for each AUV, where K ∈ N
+
, so that
there are K × L neurons in all. The connection weight of each
output neuron, i.e., the weight W
jk
=(x, y, z) of that neuron,
is given by a 1 × 3 weight vector, which is initialized as the
coordinates of the initial AUV position. The network is initial-
ized with the weight vector R
jk
= W
jk
=(w
jkx
,w
jky
,w
jkz
),
where j =1, 2,...,J and k =1, 2,...,K. R
jk
changes with
W
jk
during every computation iteration. After the iterations, we
obtain a 3 × J × K matrix R that denotes the coordinates of the
output neurons, i.e., the trajectories of t he AUVs. The input data
set is given sequentially to the network in a random order during
the iterations, i.e., targets’ coordinates are inputted to the net-
work one by one until the last target. This input strategy with the
random order of the input data results in the robustness of the al-
gorithm and reduces its dependence on initial workspace config-
uration. During this process of formation, the visiting sequence
of the points by AUVs is gradually worked out, and the points
would attract output neurons to form a formation for the AUVs.
The iterations end until all of the AUVs reach the points. In
order to assure that each point in the formation gets an AUV, we
set L = J in the algorithm. Note that the relationship between
L and J are defined by the algorithm, which means the corre-
spondence between AUVs and the target points are not fixed.
III. M
AIN ALGORITHM
In order to further explain how the SOM method is applied
on formation control of a multiple AUV system, mathematical
models and formulas with some discussions are given in this
section.
Notations and definitions: for a vector ω ∈ R
n
, the norm |·|
is defined as |ω| = |ω|
2
=(
n
i =1
|ω
i
|
2
)
1
2
.
Authorized licensed use limited to: Southeast University. Downloaded on October 15,2020 at 03:04:21 UTC from IEEE Xplore. Restrictions apply.
下载后可阅读完整内容,剩余10页未读,立即下载
2022-08-03 上传
160 浏览量
2021-08-08 上传
116 浏览量
101 浏览量
2021-08-13 上传
193 浏览量
2021-08-14 上传
2021-08-14 上传

王莽v2
- 粉丝: 1w+
 我的内容管理
展开
我的内容管理
展开








最新资源
- 掌握这11个Spring核心jar包,助你快速搭建项目
- 经典XP系统图标资源下载指南
- 免安装迷你PDF阅读器:快速且低内存占用
- 深入解析Hugflash元素提取技术
- HarmonyOS2下的音乐文件夹管理器Harmony使用指南
- SAP HANA NGDBC驱动使用与安装详解
- JACOB库文件下载指南:jacob.jar与jacob.dll
- 软件加密解密技术的内幕解析
- JSP实现的玉米生长动态模拟系统研究
- 深入解析J1939协议在C语言中的实现方法
- 深入解析:IE缓存提取工具IEContent的使用
- 掌握allpairs测试工具:有效组合条件自动化测试
- 模拟高速公路交通的面向代理编程项目
- CSDN创刊号:《C&C++杂志》电子版首发珍藏
- 电脑版二维码生成器:快速创建二维码文件
- 采购现金预算表:高效管理采购成本的参考工具






















