ADI SC573数据手册:SHARC+双核DSP与Cortex-A5处理器
需积分: 5 77 浏览量
更新于2024-07-19
收藏 3.38MB PDF 举报
ADI SC573是一款由Analog Devices公司生产的高性能数字信号处理器(DSP),它融合了SHARC+双核架构以及一个ARM Cortex-A5内核。SHARC和SHARC+都是Analog Devices公司的注册商标,代表着该公司在高性能信号处理领域的先进技术。这款产品的主要特性包括:
1. **双核增强SHARC+核心**:每个SHARC+核心具有强大的浮点运算能力,能够达到高达450MHz的工作频率,提供了极高的计算性能。
2. **存储资源**:每颗SHARC+核心配备最多3Mb(384kB)L1静态随机存取内存(SRAM),支持奇偶校验,可作为缓存使用,具有灵活性。用户可以根据需求配置这些存储资源。
3. **多模式计算**:支持32位、40位和64位浮点运算,以及32位固定点运算,可以适应不同的应用场景,提供广泛的精度选项。
4. **地址线兼容性**:设计有字节、短字、字和长字等多种地址寻址方式,增加了对不同数据结构的兼容性。
5. **ARM Cortex-A5集成**:与Cortex-A5内核相结合,使得SC573成为一个功能丰富的系统级芯片,能够处理控制任务和实时应用,增强了系统的整体效能。
6. **文档反馈**:Analog Devices对其提供的信息持信心,但不承担因使用该产品可能引发的专利侵权或其他第三方权利问题的责任,并且规格可能会随时更新,未经明确许可,不涉及任何专利授权。
7. **联系方式与版权信息**:ADI公司的联系信息、技术支持网站和版权声明,提醒用户尊重知识产权并寻求官方支持。
ADI SC573是一款专为高性能信号处理和混合信号应用设计的双核处理器,其卓越的性能、灵活的存储配置和多模式计算能力使其在工业控制、通信、音频处理等领域具有广泛的应用潜力。用户在使用时应确保遵循相关规范,并参考最新的技术文档以获取最新信息。

Rev. 0 | Page 16 of 142 | June 2017
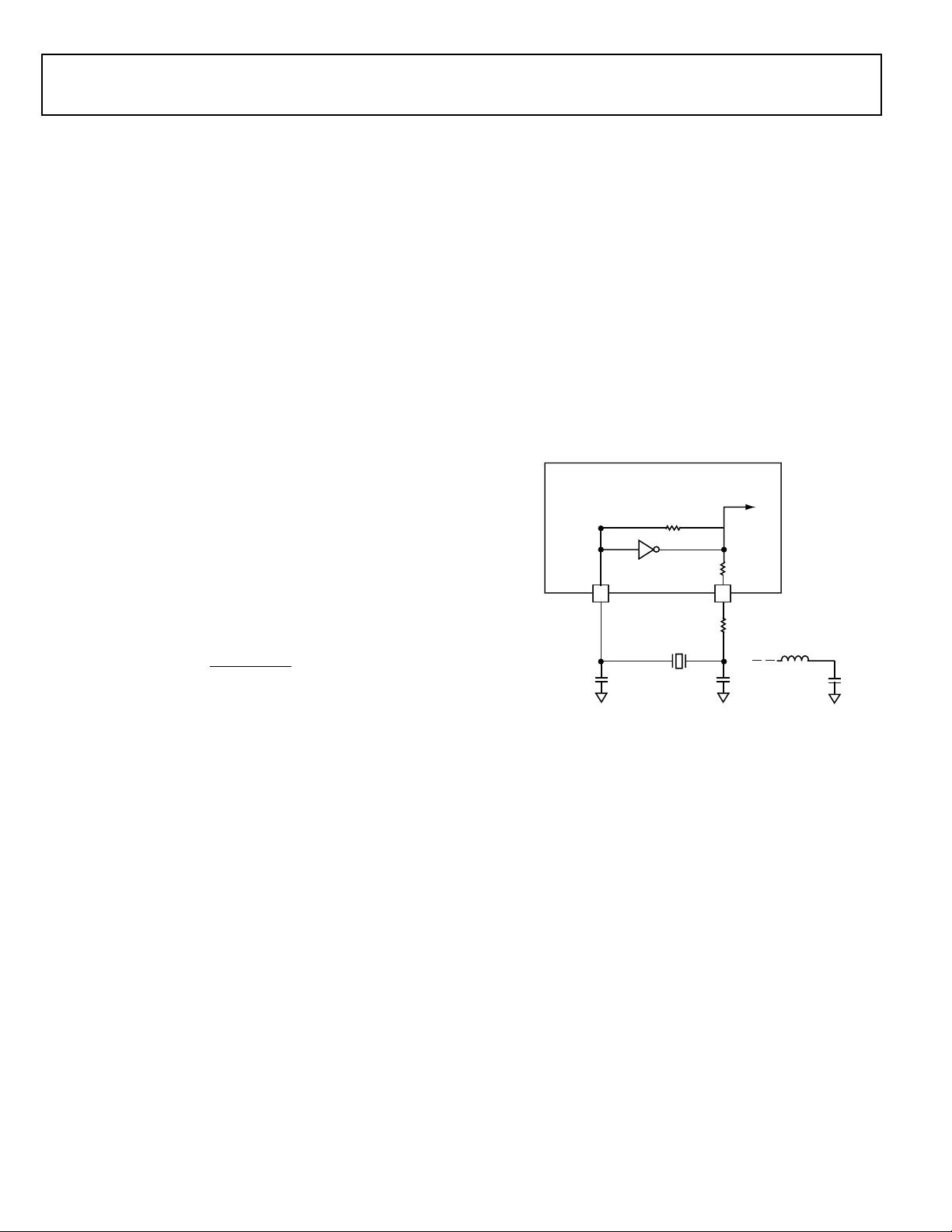
The S/PDIF interface supports one stereo channel or com-
pressed audio streams. The S/PDIF transmitter and receiver are
AES3 compliant and support the sample rate from 24 KHz to
192 KHz. The S/PDIF receiver supports professional jitter
standards.
The S/PDIF receiver/transmitter has no separate DMA chan-
nels. It receives audio data in serial format and converts it into a
biphase encoded signal. The serial data input to the receiver/
transmitter can be formatted as left justified, I
2
S, or right justi-
fied with word widths of 16, 18, 20, or 24 bits. The serial data,
clock, and frame sync inputs to the S/PDIF receiver/transmitter
are routed through the signal routing unit (SRU). They can
come from various sources, such as the SPORTs, external pins,
and the precision clock generators (PCGs), and are controlled
by the SRU control registers.
Precision Clock Generators (PCG)
The precision clock generators (PCG) consist of two units
located in the DAI block. The PCG can generate a pair of signals
(clock and frame sync) derived from a clock input signal
(CLKIN, SCLK0, or DAI pin buffer). Both units are identical in
functionality and operate independently of each other. The two
signals generated by each unit are normally used as a serial bit
clock/frame sync pair.
Enhanced Parallel Peripheral Interface (EPPI)
The processors provide an enhanced parallel peripheral inter-
face (EPPI) that supports data widths up to 16 bits for the BGA
package and 12 bits for the LQFP package. The EPPI supports
direct connection to thin film transistor (TFT) LCD panels, par-
allel ADCs and DACs, video encoders and decoders, image
sensor modules, and other general-purpose peripherals.
The features supported in the EPPI module include the
following:
• Programmable data length of 8 bits, 10 bits, 12 bits, 14 bits,
and 16 bits per clock.
• Various framed, nonframed, and general-purpose operat-
ing modes. Frame syncs can be generated internally or ca
n
be supplied by an external device.
• ITU-656 status word error detection and correction for
ITU-656 receive modes and ITU-656 preamble and status
word decoding.
• Optional packing and unpacking of data to/from 32 bits
fr
om/to 8 bits and 16 bits. If
packing/unpacking is enabled,
configure endianness to change the order of pack-
ing/unpacking of bytes or words.
• RGB888 can be converted to RGB666 or RGB565 for trans-
mit modes.
• Various deinterleaving/interleaving modes for receiv
ing or
transmitting 4:2:2 YCrCb data.
• Configurable LCD data enable output available on Frame
Sync 3.
Universal Asynchronous Receiver/Transmitter
(UART) Ports
The processors provide three full-duplex universal asynchro-
nous receiver/transmitter (UART) ports, fully compatible with
PC standard UARTs. Each UART port provides a simplified
UART interface to other peripherals or hosts, supporting full-
duplex, DMA supported, asynchronous transfers of serial data.
A UART port includes support for five to eight data bits as well
as no parity, even parity, or odd parity.
Optionally, an additional address bit can be transferred to inter-
rupt only addressed nodes in multidrop bus (MDB) systems. A
frame is terminated by a configurable number of stop bits.
The UART ports support automatic hardware flow control
through the clear to send (CTS) input and request to send (RTS)
output with programmable assertion first in, first out (FIFO)
levels.
To help support the Local Interconnect Network (LIN) proto-
cols, a special command causes the transmitter to queue a break
command of programmable bit length into the transmit buffer.
Similarly, the number of stop bits can be extended by a pro-
grammable interframe space.
Serial Peripheral Interface (SPI) Ports
The processors have three industry-standard SPI-compatible
ports that allow the processors to communicate with multiple
SPI-compatible devices.
The baseline SPI peripheral is a synchronous, 4-wire interface
consisting of two data pins, one device select pin, and a gated
clock pin. The two data pins allow full-duplex operation to
other SPI-compatible devices. An extra two (optional) data pins
are provided to support quad-SPI operation. Enhanced modes
of operation, such as flow control, fast mode, and dual-I/O
mode (DIOM), are also supported. DMA mode allows for trans-
ferring several words with minimal central processing unit
(CPU) interaction.
With a range of configurable options, the SPI ports provide a
glueless hardware interface with other SPI-compatible devices
in master mode, slave mode, and multimaster environments.
The SPI peripheral includes programmable baud rates, clock
phase, and clock polarity. The peripheral can operate in a multi-
master environment by interfacing with several other devices,
acting as either a master device or a slave device. In a multimas-
ter environment, the SPI peripheral uses open-drain outputs to
avoid data bus contention. The flow control features enable slow
slave devices to interface with fast master devices by providing
an SPI ready pin (SPI_RDY) which flexibly controls the
transfers.
The baud rate and clock phase and polarities of the SPI port are
programmable. The port has integrated DMA channels for both
transmit and receive data streams.
Link Port (LP)
Two 8-bit wide link ports (LPs) for the BGA package (one link
port for the LQFP package) can connect to the link ports of
other DSPs or peripherals. Link ports are bidirectional and have
eight data lines, an acknowledge line, and a clock line.
ADSP-SC572/SC573/ADSP-21573



剩余141页未读,继续阅读
153 浏览量
2014-07-30 上传
143 浏览量
303 浏览量
610 浏览量
142 浏览量
132 浏览量
2024-06-23 上传

Audio707
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







