计算机视觉SLAM与摄影测量BA算法原理对比与精度计算
需积分: 0 175 浏览量
更新于2024-08-05
收藏 381KB PDF 举报
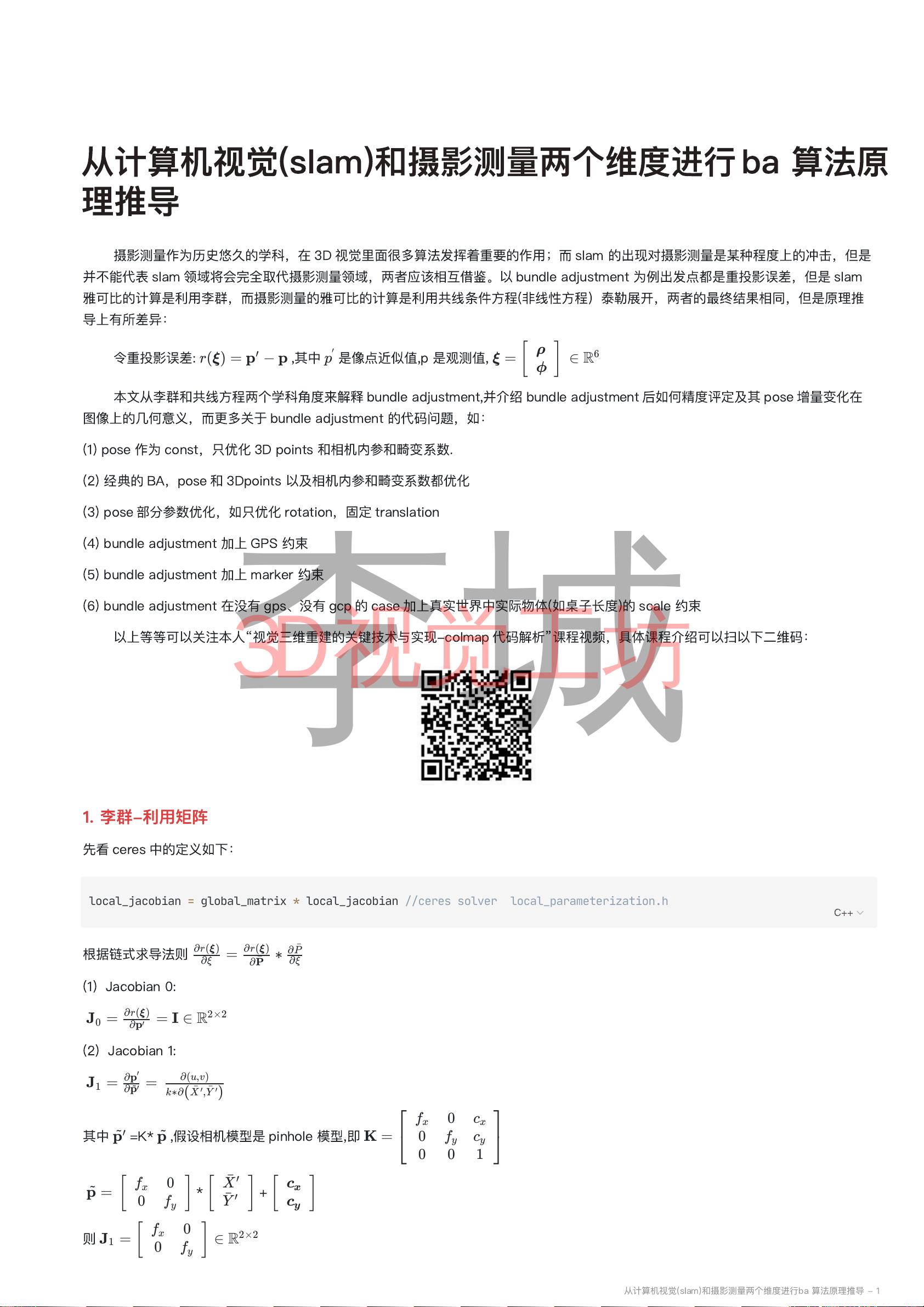
本文主要探讨了从计算机视觉SLAM(Simultaneous Localization And Mapping)和摄影测量两个维度进行Bundle Adjustment (BA) 算法的原理推导。首先,摄影测量中的共线条件方程被提及,这是BA算法的核心,用于解决多视图几何问题,尤其是在三维重建和姿态估计中。摄影测量利用共线条件方程的非线性特性进行雅可比矩阵的计算,而SLAM中的雅可比计算则基于李群理论,通过线性化过程得到相似的结果。
在SLAM中,重投影误差是BA的基础,它衡量了相机运动模型预测的观测点位置与实际观测之间的差异。BA算法通常涉及到相机内参数、3D点坐标和可能的畸变系数等变量的优化。文章列举了不同的BA场景,包括:
1. 只优化3D点和相机内参及畸变系数:在这种情况下,pose(位姿)被视为常数,仅调整其他参数。
2. 经典BA:所有变量,包括pose、3D点和相机参数,都参与优化。
3. 部分pose优化:例如只优化旋转(忽略平移),这在某些场景下可以简化计算。
4. 加入GPS约束:将外部定位信息引入,提高全局定位的精度。
5. 加入marker约束:利用标记物来增强结构化SLAM的性能。
6. 无GPS/GCP约束下的scale约束:在现实场景中,可能需要考虑物体尺度信息作为额外约束。
文章强调了精度评定的重要性,通过协方差矩阵来衡量优化后的不确定性,这有助于评估算法的稳定性和可靠性。此外,还讨论了BA算法优化后,位姿增量变化在图像上的几何含义,这对于理解算法的实际效果至关重要。
作者推荐观看其“视觉三维重建的关键技术与实现 - colmap代码解析”课程视频,该课程详细介绍了BA算法的具体实现方法和技术细节。整个讲解深入浅出,既结合了理论推导,又提供了实用的代码示例,对理解和应用BA算法具有很高的价值。
从
计
算
机
视觉
(slam)
和
摄
影
测
量
两个
维
度
进
⾏
ba
算
法
原
理
推
导
- 1
从
计
算
机
视觉
(slam)
和
摄
影
测
量
两个
维
度
进
⾏
ba
算
法
原
理
推
导
摄
影
测
量
作为
历史
悠
久
的
学
科
,
在
3D
视觉
⾥
⾯
很
多
算
法
发
挥
着
重
要
的
作
⽤
;
⽽
slam
的
出
现
对
摄
影
测
量
是某
种程
度
上
的
冲击
,
但
是
并
不
能
代
表
slam
领
域
将
会
完
全
取
代
摄
影
测
量
领
域
,两
者
应
该
相
互借
鉴
。
以
bundle adjustment
为例
出
发
点
都
是
重
投
影
误
差
,
但
是
slam
雅
可
⽐
的
计
算
是
利
⽤
李
群
,
⽽
摄
影
测
量
的
雅
可
⽐
的
计
算
是
利
⽤
共
线
条
件
⽅
程
(
⾮
线
性
⽅
程
)
泰
勒
展
开
,两
者
的
最
终结
果
相
同
,
但
是
原
理
推
导
上
有
所
差
异
:
令
重
投
影
误
差
: ,
其
中
是
像
点
近
似
值
,p
是
观
测
值
,
本
⽂
从
李
群
和
共
线
⽅
程
两个
学
科
⻆
度
来
解
释
bundle adjustment,
并
介
绍
bundle adjustment
后
如
何
精
度
评
定
及
其
pose
增
量
变
化
在
图
像
上
的
⼏
何
意
义
,
⽽
更
多
关
于
bundle adjustment
的
代
码
问题
,
如
:
(1) pose
作为
const
,
只
优
化
3D points
和
相
机
内
参和
畸
变
系
数
.
(2)
经
典
的
BA
,
pose
和
3Dpoints
以
及
相
机
内
参和
畸
变
系
数
都
优
化
(3) pose
部
分
参
数
优
化
,
如
只
优
化
rotation
,
固
定
translation
(4) bundle adjustment
加
上
GPS
约
束
(5) bundle adjustment
加
上
marker
约
束
(6) bundle adjustment
在
没
有
gps
、
没
有
gcp
的
case
加
上
真
实
世
界
中
实
际
物
体
(
如
桌
⼦
⻓
度
)
的
scale
约
束
以
上
等等
可
以
关
注
本
⼈
“
视觉
三
维
重
建
的
关
键
技
术
与
实
现
-colmap
代
码
解
析
”
课
程
视
频
,
具
体
课
程
介
绍
可
以
扫
以
下
⼆
维
码
:
1.
李
群
-
利
⽤
矩
阵
先
看
ceres
中
的
定
义
如
下:
根
据
链
式
求
导
法
则
(1) Jacobian 0:
(2) Jacobian 1:
其
中
=K* ,
假
设
相
机
模
型
是
pinhole
模
型
,
即
* +
则
r(ξ) = p −
′
p p
′
ξ = [
ρ
ϕ
] ∈ R
6
local_jacobian = global_matrix * local_jacobian //ceres solver local_parameterization.h
C++
=
∂ξ
∂r(ξ)
∗
∂P
ˉ
∂r(ξ)
∂ξ
∂P
ˉ
J =
0
=
∂p
′
∂r(ξ)
I ∈ R
2×2
J =
1
=
∂ p
~
′
∂p
′
k∗∂ ,
(
X
ˉ ′
Y
ˉ ′
)
∂(u,v)
p
~
′
p
~
K =
⎣
⎡
f
x
0
0
0
f
y
0
c
x
c
y
1
⎦
⎤
=p
~
[
f
x
0
0
f
y
] [
X
ˉ
′
Y
ˉ
′
] [
c
x
c
y
]
J =
1
∈[
f
x
0
0
f
y
] R
2×2
李城
3D视觉工坊
下载后可阅读完整内容,剩余5页未读,立即下载
2018-07-12 上传
2022-04-21 上传
109 浏览量
2019-03-28 上传
2022-08-04 上传
点击了解资源详情
点击了解资源详情
2023-05-12 上传
2023-05-12 上传

丛乐
- 粉丝: 38
- 资源: 312
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
