WinCE下CAN适配卡驱动的多线程设计与实现
PDF格式 | 244KB |
更新于2024-08-30
| 60 浏览量 | 举报
本文主要探讨的是在单片机与数字信号处理器(DSP)的嵌入式系统中,如何设计与实现基于Windows CE (WinCE)的操作系统环境下的CAN(Controller Area Network)适配卡驱动程序。WinCE作为一种轻量级、高度可定制的操作系统,为资源受限的嵌入式设备提供了多线程、多任务和优先级管理的计算平台,这在驱动程序设计中至关重要。
驱动程序在WinCE中分为两类:本地驱动程序和流接口驱动程序。本地驱动程序,即Build-In驱动,作为独立的任务运行,直接操作硬件,适用于完成特定功能的驱动。相比之下,流接口驱动程序更为通用,它们将设备操作集成到内核I/O系统中,通过统一的接口和管理模型,使得设备能被看作是文件系统的一部分,方便用户进行管理和操作。
文章着重介绍了流接口驱动程序,特别是针对PC/104-CAN适配卡的实现。CAN总线作为一种工业级通信标准,以其高效率、灵活性和多主工作模式而受到青睐。文章的实现焦点在于SJA1000这样的CAN控制器,其内部结构包括接口管理逻辑和发送缓存器,用于处理数据传输和管理。
具体来说,驱动程序设计涉及以下关键环节:
1. **WinCE平台支持**:理解并利用WinCE提供的多线程和多任务特性,确保驱动程序能够在并发环境中稳定运行。
2. **CAN适配卡控制器**:熟悉SJA1000的工作原理和接口,实现与CAN总线的高效通信。
3. **流接口设计**:设计驱动程序接口,使其能够与WinCE的I/O系统无缝协作,提供统一的设备管理和服务。
4. **冲突仲裁与优先级管理**:利用CAN总线的优先级机制,确保在多节点网络中的可靠通信。
5. **驱动加载方式**:本文实现的驱动程序是在系统启动时加载的,这意味着在启动阶段就需要初始化并准备好与CAN总线的连接。
通过这样的设计,驱动程序不仅实现了底层硬件与上层应用之间的通信桥梁,还提升了系统的整体性能和用户体验。对于从事嵌入式系统开发的工程师来说,理解和掌握这类驱动程序的实现是至关重要的技能。
单片机与单片机与DSP中的基于中的基于WinCE的的CAN适配卡驱动程序的设计与适配卡驱动程序的设计与
实现实现
1 引言 WinCE是一种为多种嵌入式系统和产品设计的紧凑、高效、可升级的操作系统,WinCE 采用标准模
式,其最主要的特征:为有限的硬件资源提供了多线程、多任务和完全优先级的计算环境。 WinCE操作系
统支持两种类型的驱动程序:本地驱动程序(Build-In),是把设备驱动程序作为独立任务实现,直接在顶层任务
中实现硬件操作,完成特有专用的驱动程序;流接口驱动程序,WinCE的I/O系统将设备程序作为内核过程实
现,这种方式便于实现I/O子系统的层次模型,便于文件系统一起把设备作为特殊文件处理,提供统一的管理、
统一的界面和统一的使用方法,并把设备、文件及网络通信组织成为一致的更高层次
1 引言引言
WinCE是一种为多种嵌入式系统和产品设计的紧凑、高效、可升级的操作系统,WinCE 采用标准模式,其最主要的特
征:为有限的硬件资源提供了多线程、多任务和完全优先级的计算环境。
WinCE操作系统支持两种类型的驱动程序:本地驱动程序(Build-In),是把设备驱动程序作为独立任务实现,直接在顶层
任务中实现硬件操作,完成特有专用的驱动程序;流接口驱动程序,WinCE的I/O系统将设备程序作为内核过程实现,这种方
式便于实现I/O子系统的层次模型,便于文件系统一起把设备作为特殊文件处理,提供统一的管理、统一的界面和统一的使用
方法,并把设备、文件及网络通信组织成为一致的更高层次的抽象,为用户提供统一的系统服务和用户接口。驱动程序封装了
将这些命令转换为它所控制的设备上的适当操作所需的全部信息。流接口驱动程序有在启动时加载和动态加载两种方式。本文
实现的在WinCE环境下流结构的PC/104-CAN驱动程序是在系统启动时加载的。
2 CAN总线技术简介总线技术简介
CAN总线是德国Bosch公司开发的一种串行数据通信协议,CAN总线属于总线式串行通讯网络,具有总线为多主方式工作
且无需站地址节点信息、CAN网络上的节点信息分成不同的优先级、总线冲突仲裁时间低和总线的通信介质选择灵活等优
点。
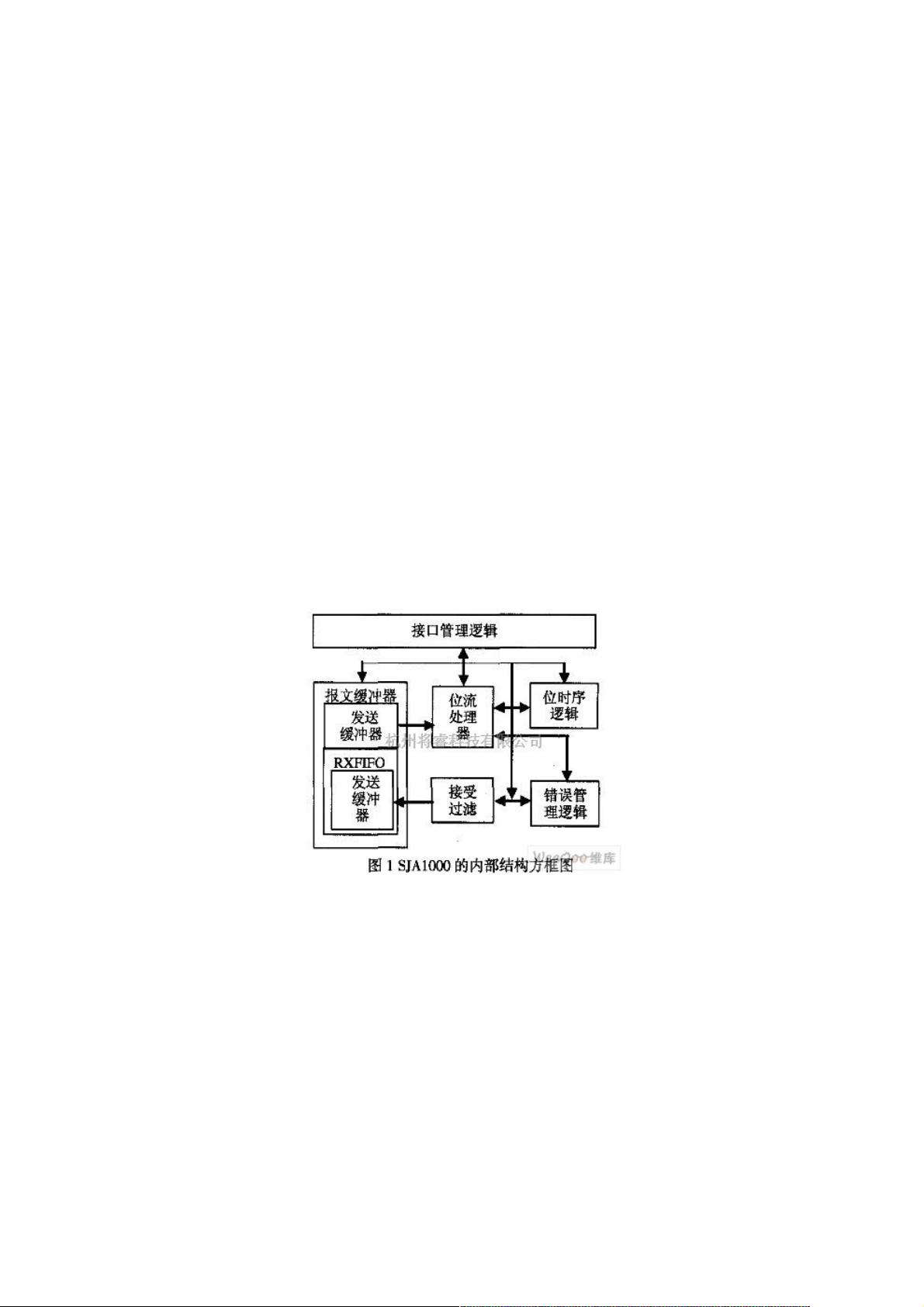
CAN适配卡的核心工作单元是它的控制器,控制器SJA1000的组织结构如图1所示。
其中,接口管理逻辑(IML):接收来自微控制器的命令,控制CAN寄存器的寻址,并向微控制器提供中断和状态信息;
发送缓存器:存贮发送到CAN网络上的完整信息;位流处理器(BSP):是一个控制发送缓存器和接收缓存器与CAN总线之
间控制数据流的程序装置,同时具有执行错误检测、仲裁、总线填充和错误处理的能力;位定时逻辑(BTL)单元:主要监视
串口的CAN总线,并处理与总线有关的位时序,使SJA1000同步于CAN总线上的位流;错误管理逻辑(EML):主要完成接
收BSP的出错报告,并按照CAN协议完成错误界定, 从而使BSP和IML进行错误统计。
CAN适配卡的硬件网络工作环境示意图如图2所示。
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐


weixin_38537689
- 粉丝: 4
- 资源: 905
 我的内容管理
展开
我的内容管理
展开







最新资源
- 英语常用3500词音频+PDF文件(含音频).zip
- 老板计时器
- Honey Boo Boo的算法和功能分解
- ember-addon-config
- 1.8wUA库.zip
- reading-notes:在这里您可以找到我的阅读资料库,主要用于总结我在编程方面的学习历程,希望您能找到一些有用的信息<3
- 视频播放可弹出弹幕,关闭弹幕
- simple-spawner:生成一个命令并将输出通过管道返回到 std{in,out,err}
- CSS_Assignment_2
- 使用注释将JDBC结果集映射到对象
- curious-blindas-api:CuriousCat克隆
- PRO-C21-BULLETS-AND-WALLS
- ff35mm:Flickr 的全画幅 (35mm) 焦距
- C#解析HL7消息的库
- 将Java System.out定向到文件和控制台的快速简便方法
- 库索逻辑-葡萄牙语
